Implémentation et simulation de Boucles de Régulation avec le PID Mlle. Wafaà BENALI OUENZAR Université des Sciences et de la Technologie d’Oran, Mohamed Boudiaf Faculté de génie électrique département d’électronique - 2012/2013
Le drone quadrotor UAV et ses applications commerciales ZITOUNI Abdelhak Amine Université des Sciences et de la Technologie Houari Boumediene - Faculté d’Electronique Et Informatique Mémoire de projet de fin d’études Master en électronique - Promotion : JUIN 2018
Programmation sous step7 : blocs des systèmes et contrôleur flou Implémentation et simulation de Boucles de Régulation
Automate programmable et step7 : régulations pour SIMATIC S7 Implémentation et simulation de Boucles de Régulation
La logique floue et la combinaison des règles et défuzzification Implémentation et simulation de Boucles de Régulation
Réalisation d’un PID sous STEP7 avec le bloc de régulation Implémentation et simulation de Boucles de Régulation
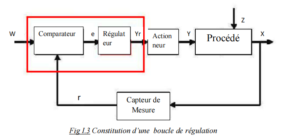
Régulation PID, qualités attendues et Type de régulateurs Implémentation et simulation de Boucles de Régulation
Implémentation et simulation de Boucles de Régulation avec le PID Implémentation et simulation de Boucles de RégulationUniversité des sciences et de la technologie d’Oran Mohamed-Boudiaf