Automate programmable et step7 : régulations pour SIMATIC S7
Chapitre III : Automate programmable et step7
III.1-Step7
STEP 7 est le progiciel de base pour la configuration et la programmation de systèmes d’automatisation SIMATIC. Il fait partie de l’industrie logicielle SIMATIC. Le progiciel de base STEP 7 existe en plusieurs versions :
- STEP 7-Micro/DOS et STEP 7-Micro/Win pour des applications autonomes simples sur SIMATIC S7 – 200.
- STEP 7 pour des applications sur SIMATIC S7-300/400, SIMATIC M7-300/400 et SIMATIC C7 présentant des fonctionnalités supplémentaires :
-
- Possibilité d’extension grâce aux applications proposées par l’industrie logicielle SIMATIC (voir aussi Possibilités d’extension du logiciel de base STEP 7)
- Possibilité de paramétrage de modules fonctionnels et de modules de communication
- Forçage et fonctionnement multiprocesseur
- Communication par données globales
- Transfert de données commandé par événement à l’aide de blocs de communication et de blocs fonctionnels
- Configuration de liaisons STEP 7 fait l’objet du présent manuel d’utilisation, STEP 7- Micro étant décrit dans la documentation « STEP 7-Micro/DOS ».
-
III.2-Logiciel de base STEP 7
Les langages de programmation SIMATIC intégrés à STEP 7 répondent à la norme DIN EN 6.1131-3. Le progiciel de base s’exécute sous le système d’exploitation Windows 95/98/NT/2000 et s’adapte à son organisation graphique orientée objet.
III.3Fonctions du logiciel de base
Le logiciel de base assiste dans toutes les phases du processus de création de solutions d’automatisation, comme par exemple :
- La création et la gestion de projets,
- La configuration et le paramétrage du matériel et de la communication,
- La gestion des mnémoniques,
- La création de programmes, par exemple pour les systèmes cible S7,
- Le chargement de programmes dans des systèmes cible,
- Le test de l’installation d’automatisation,
- Le diagnostic lors de perturbations de l’installation.
III.4- Applications disponibles
Le logiciel de base STEP 7comprend différentes applications :
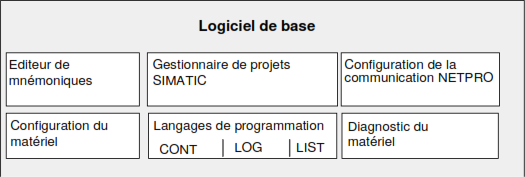
Fig III.1 Applications disponibles
III.5- Langages de programmation
Les langages de programmation CONT, LIST et LOG pour S7-300/400 font partie intégrante du logiciel de base.
- Schéma à contacts (CONT)
C’est un langage de programmation graphique. La syntaxe des instructions fait penser aux schémas de circuits. CONT permet de suivre facilement le trajet du courant entre les barres d’alimentation en passant par les contacts, les éléments complexes et les bobines.
- Liste d’instructions (LIST)
C’est un langage de programmation textuel proche de la machine. Dans un programme LIST, les différentes instructions correspondent, dans une large mesure, aux étapes par lesquelles la CPU traite le programme. Pour faciliter la programmation, LIST a été complété par quelques structures de langage évolué (comme, par exemple, des paramètres de blocs et accès structurés aux données).
- Logigramme (LOG)
C’est un langage de programmation graphique qui utilise les boîtes de l’algèbre de Boole pour représenter les opérations logiques. Les fonctions complexes, comme par exemple les fonctions mathématiques, peuvent être représentées directement combinées avec les boîtes logiques.
- S7-SCL (Structured Control Language)
C’est un langage de programmation évolué proche du PASCAL, utilisé pour programmer des automates programmables avec SIMATIC S7. S7-SCL correspond au langage évolué textuel ST (Structured Text) défini dans la norme CEI 61131-3 et a été conçu en vue de la certification pour Reusability Level.
III.6- Domaine d’application de S7-SCL
S7-SCL est optimisé pour la programmation d’automates programmables et contient, outre des éléments du langage de programmation PASCAL, également des éléments d’automatisation typiques, tels que p. ex. des entrées/sorties, temporisations et compteurs. S7-SCL convient tout particulièrement aux tâches suivantes :
- Programmation d’algorithmes complexes,
- Programmation de fonctions mathématiques,
- Gestion de données ou de recettes,
- Optimisation de processus.
III.6.1 -Fonctionnement de S7-SCL
Intégration à STEP 7, S7-SCL prend en charge le concept de blocs STEP 7.
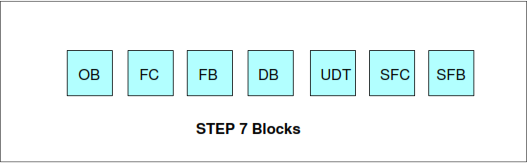
Fig III.2 Blocs STEP7
Avec S7-SCL, pouvez créer les blocs STEP 7 suivants :
- OB: Bloc d’organisation.
- FC: Bloc fonction.
- FB: Function bloc.
- DB: Bloc de donné.
- UDT: S’ont des types complexe que nous définissons nous même au besoin.les UDT s’emploient comme des blocs.
FBD : fonction bloc de donné.
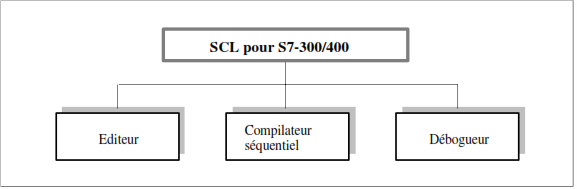
Fig.III.3 Composants de l’environnement de développement.
III.6.2-Structure de programme S7-SCL
III.6.2.1-Blocs dans les sources S7-SCL
Dans une source S7-SCL, on peut programmer de 1 à n blocs. De par leur fonction, leur structure ou leur emploi prévu, les blocs STEP 7 sont des parties limitées d’un programme utilisateur.
III.6.2.2-Types de bloc
Un programme S7-SCL structuré permet de résoudre au mieux le problème posé. Un tel programme est de construction modulaire, c’est-à-dire divisé en blocs chargés chacun d’une tâche partielle bien déterminée. Comme dans les langages de programmation de STEP 7, vous disposez dans S7-SCL des types de bloc suivants.
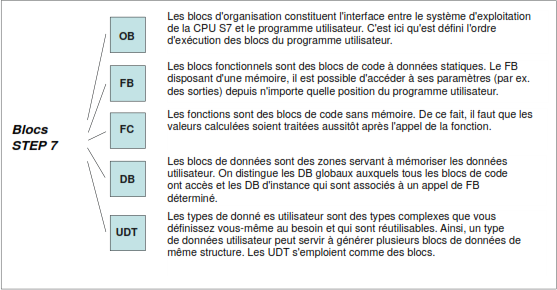
Fig.III.4 Type de blocs
III.6.3-Rangement des blocs dans des sources S7-SCL
Un programme S7-SCL se compose d’une ou de plusieurs sources S7-SCL. Une source peut contenir un seul bloc ou un programme complet constitué de différents blocs.
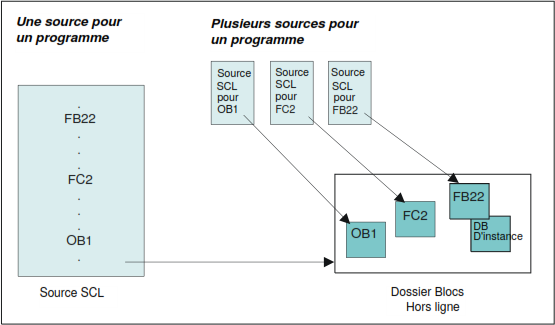
Fig.III.5 Rangement des blocs dans des sources S7-SCL.
III.7-Langages évolués
On dispose des logiciels de langage optionnels suivants pour la programmation des automates programmables SIMATIC S7-300/400.
III.7.1-GRAPH
C’est un langage de programmation permettant la description aisée de commandes séquentielles (programmation de graphes séquentiels). Le déroulement du processus y est subdivisé en étapes.
Celles-ci contiennent en particulier des actions pour la commande des sorties. Le passage d’une étape à la suivante est soumis à des conditions de transition.
III.7.2-HiGraph
C’est un langage de programmation permettant la description aisée de processus asynchrones non séquentiels sous forme de graphes d’état. A cet effet, l’installation est subdivisée en unités fonctionnelles pouvant prendre différents états. Ces unités fonctionnelles peuvent se synchroniser par l’échange de messages.
III.8- Logiciels exécutables
Il s’agit de solutions logicielles finies programmées pouvant être appelées dans le programme utilisateur. Les logiciels exécutables sont directement intégrés dans la solution d’automatisation. Ils englobent :
- Des régulations pour SIMATIC S7. Des exemples en sont les régulations standard, modulaire et Fuzzy.
- Des applications de couplage des systèmes d’automatisation avec des applications Windows, un système de fonctionnement en temps réel pour SIMATIC M7.
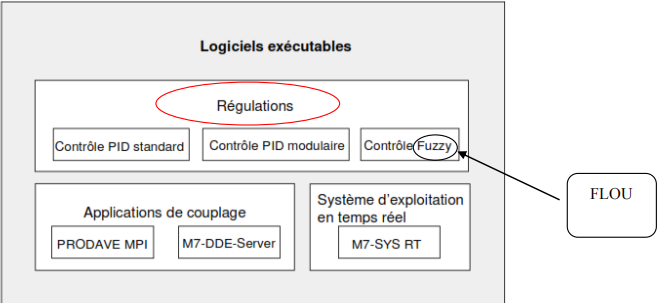
Fig.III.6 Logiciels exécutable.
III.9-Régulations pour SIMATIC S7
III.9.1-Le contrôle PID standard
Permet l’intégration de régulateurs à action continue, de régulateurs à impulsion et de régulateurs incrémentiels dans le programme utilisateur.
L’application de paramétrage à laquelle la définition du régulateur est intégrée permet le paramétrage rapide et le réglage optimal du régulateur.
III.9.2-Le contrôle PID modulaire
C’est la mise en œuvre lorsqu’un régulateur PID simple ne permet pas la résolution de la tâche d’automatisation. La mise en circuit des blocs fonctionnels standard fournis permet de réaliser quasiment toutes les structures techniques de régulation.
III.3-Composants SIMATIC
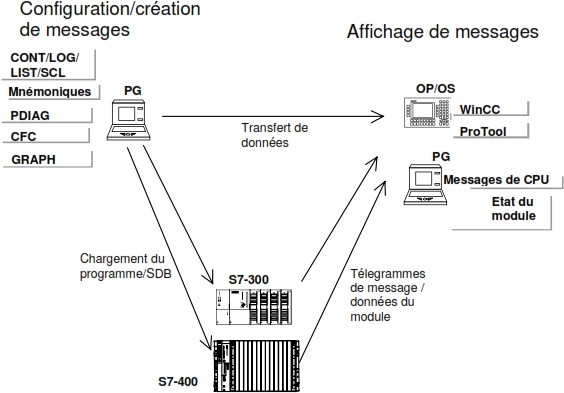
Fig III.7 Composantes simatic.
III.10-API( automate programmable)
Un automate programmable industriel, ou API, est un dispositif électronique programmable destiné à la commande de processus industriels par un traitement séquentiel.
Il envoie des ordres vers les préactionneurs (partie opérative ou PO côté actionneur) à partir de données d’entrées (capteurs) (partie commande ou PC côté capteur), de consignes et d’un programme informatique.
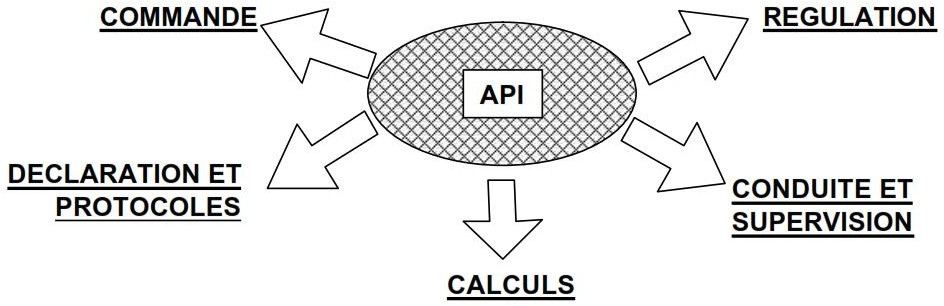
Fig.III.8 Communication API.
REMARQUE :
Nous avons travaillé en simulation avec le S7-300.
III.10.1-SIMATIC S7-300
C’est un système de commande modulaire pour des applications haut de gamme. Il dispose d’une gamme de modules complète pour une adaptation optimale aux tâches les plus diverses et se caractérise par la facilité de réalisation d’architectures décentralisées et la simplicité d’emploi.
III.10.2-Modules susceptibles de faire partie d’un système d’automatisation modulaire S7-300 sont les suivants :
- Un module unité centrale (CPU) : plusieurs CPU sont disponibles pour couvrir diverses gammes de performances ; certaines d’entre elles sont avec des entrées et sorties intégrées et les fonctions appropriées et d’autres sont à interface PROFIBUS-DP intégrée.
- Des modules interfaces pour signaux (SM) pour les entrées et les sorties numériques et analogiques.
- Des modules de communication (CP) pour l’évolution en réseau et pour la liaison point à point.
- Des modules de fonction (FM) pour le comptage rapide et le positionnement(en boucle ouverte et fermée). La technique de montage simple confère à l’API S7-300 une grande souplesse d’utilisation et une excellente convivialité :
- Fixation des modules : les modules sont simplement accrochés et encliquetés sur un profilé support, puis vissés.
- Bus de fond de panier intégré : le bus de fond de panier est intégré dans les modules. La liaison entre les modules est assurée par des connecteurs de bus enfichés au dos des modules.
III.10.3-Remplacement des modules simple et sans interversion
Pour changer un module, il suffit de desserrer la vis de fixation. Le connecteur frontal câblé s’enlève sans difficulté. Au remontage, le détrempage du connecteur frontal empêche son embrochage sur un mauvais type de module.
Pas d’emplacements imposés : les modules de signaux et de communication peuvent être enfichés sans aucune restriction ; le système se configure alors de lui-même.
III.10.4- S7-300 dispose de diverses interfaces de communication
Modules de communication pour la connexion aux bus AS-Interface, PROFIBUS et Industriel Ethernet interface multipoint MPI intégrée dans la CPU ; la solution économique, pour le raccordement simultané de PC, de systèmes de dialogue opérateur HMI et d’autres systèmes SIMATIC S7.
C’est afin de présenter expérimentalement la performance et la grande flexibilité de ce système d’automatisation S7-300 et d’apprendre à s’en servir, qu’ELWE Systèmes Didactiques a développé la console de travaux pratiques API S7-300 ; du reste, les CPU et les modules ont été choisis en fonction de nombreux critères didactiques : Une alimentation en tension, trois CPU, 3 modules d’entrées et de sorties ainsi que 2 modules de communication.
La programmation des CPU est effectuée à l’aide du logiciel STEP 7 ou STEP 7-Mini.
III.10.5- CPU d’API S7-300
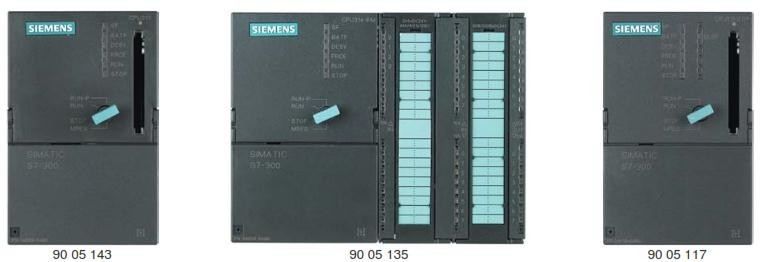
Fig.III.9 CPU de l’API S7-300

Fig.III.10 CPU du S7-300.
III.10.6-Logiciel STEP7 de programmation du S7-300
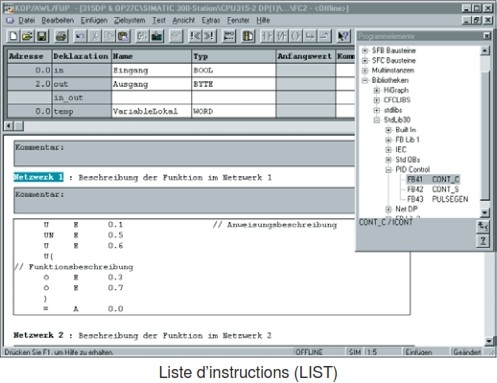
Fig.III.11 Langage LIST.
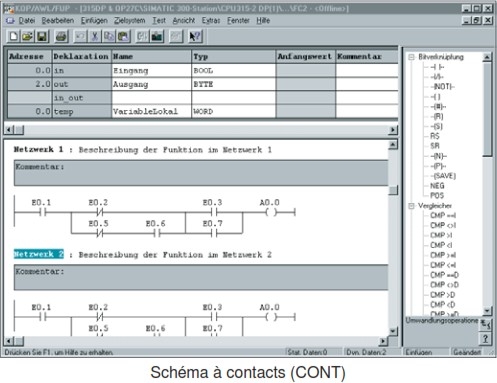
Fig III.12 Langage à CONTACT
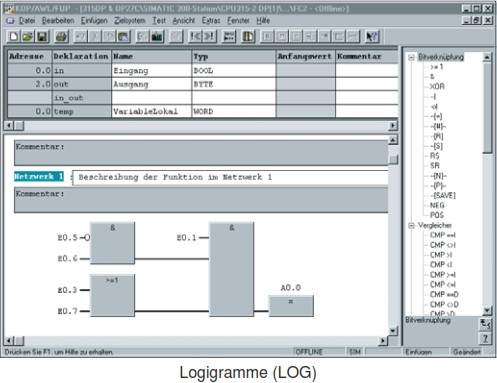
Fig III.13 Langage FBD
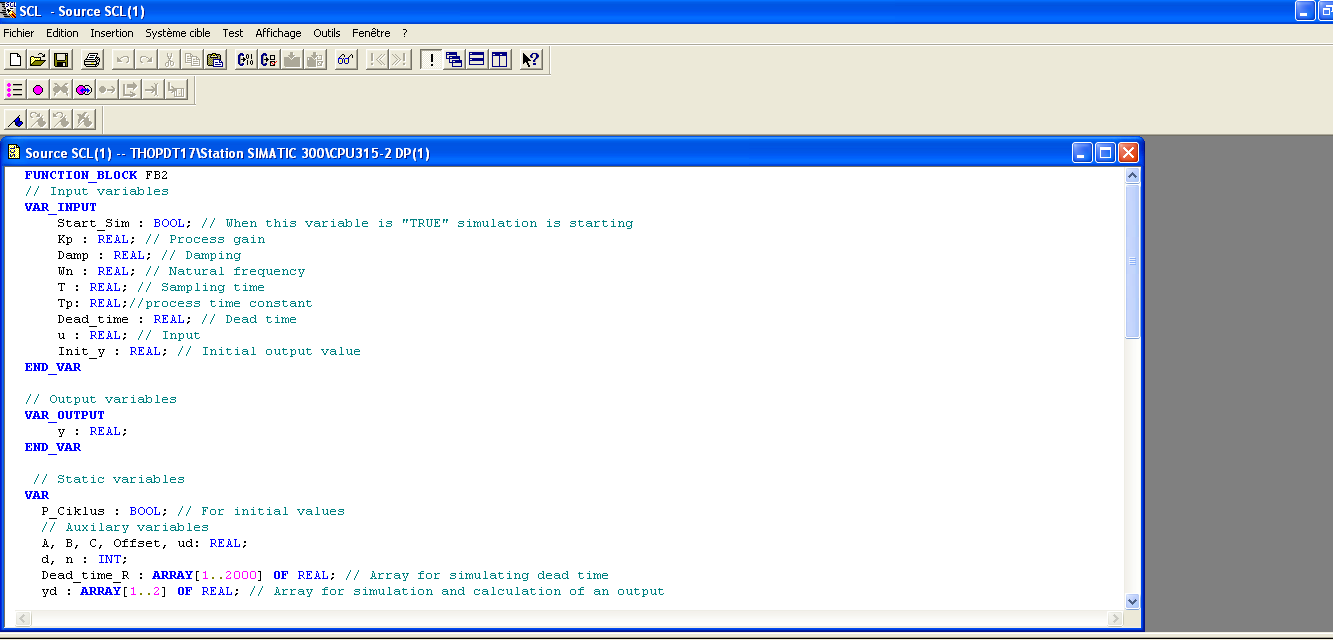
Fig.III.14 Langage SCL
III.11-Automatisation sur PC : logiciel de supervision WinCC :
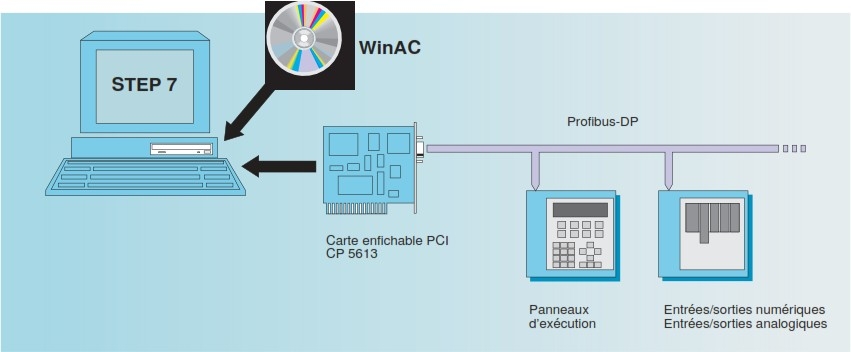
Fig III.15 Automatisation sur PC
III.12 Présentation synoptique de la « DCS »
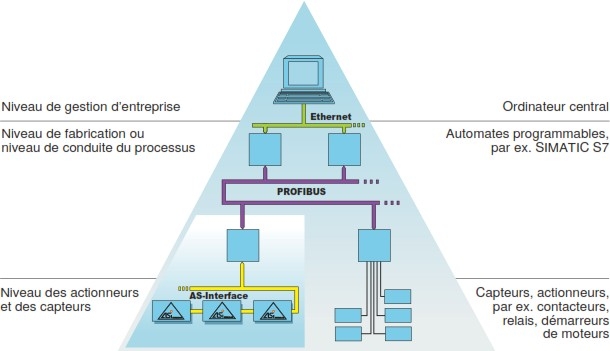
Fig III.16 Communication industrielle
La répartition hiérarchique des niveaux de commande est désormais une Méthode couramment utilisée grâce à laquelle il est possible, même pour des systèmes automatisés complexes, d’avoir un aperçu des différents réseaux de données et protocoles ainsi que des nombreux dispositifs de commande.
III.13 Conclusion
Dans ce chapitre, nous avons vu le SIMATIC SIEMENS STEP7 et ces application aux domaines industrielle et l’automate programmable ‘’API’’ « S7-300 » et le nouveau langage SCL.
Nous verrons dans le chapitre suivant les principales étapes de programmation du PID classique et du contrôleur flou sous step7 et leurs simulations sous MATLAB et WinCC.