Résultats de simulation avec un PID classique
Chapitre V: Résultats de simulation avec un PID classique
Les performances du contrôleur classique sont testées en utilisant différents modèles de processus. Les tests sont effectués sur la plateforme S7 sous le logiciel PLCSIM qui permet de simuler un API réel et sous le logiciel MATLAB/SIMULINK.
Ensuite nous avons présenté les systèmes 1er, 2eme et 3eme ordre avec et sans retard sous MATLAB, STEP7 et WinCC.
V.1-Réponse d’un système du 1er ordre avec et sans retard
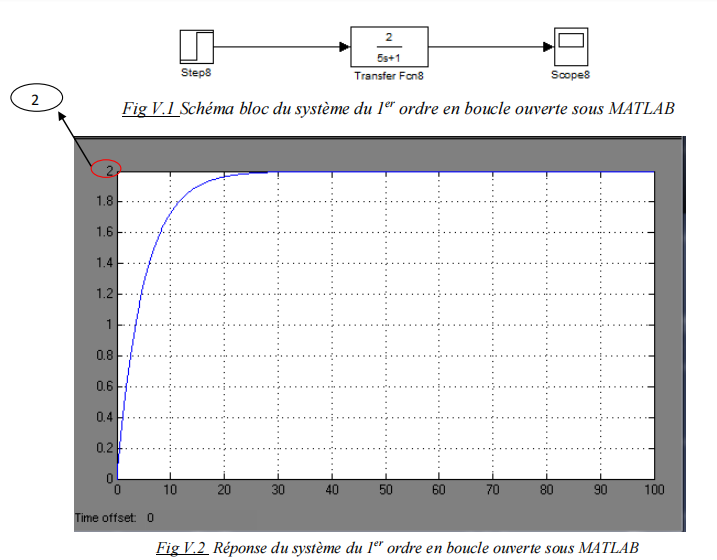
V.1.1-Réponse du système du 1er ordre sans retard en boucle ouverte sous MATLAB
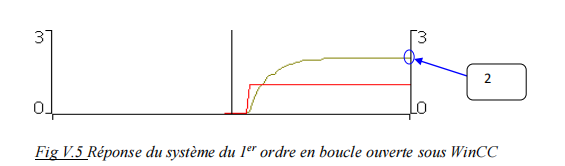
V.1.2-Réponse du système du 1er ordre en boucle ouverte sous WinCC
Il ya deux méthodes pour avoir la réponse de système en boucle ouverte sous wincc, les méthodes sont les suivantes :
V.1.3 Configuration du block OB35 pour avoir la réponse du 1er ordre
- Pour le FB1 pas de modification mais pour le FB41 on a désactivé l’option de l’intégration ‘’I_SEL’’ par ‘’ALWAYS_OFF’’ .
- La valeur du gain est mise à ‘’1’’, finalement le PID devient une simple connection comme le montre la Fig.V.3, il ya comme entrée ‘’MD40’’ ‘’la consigne’’ et la sortie ‘’SO_PV’’ du système .
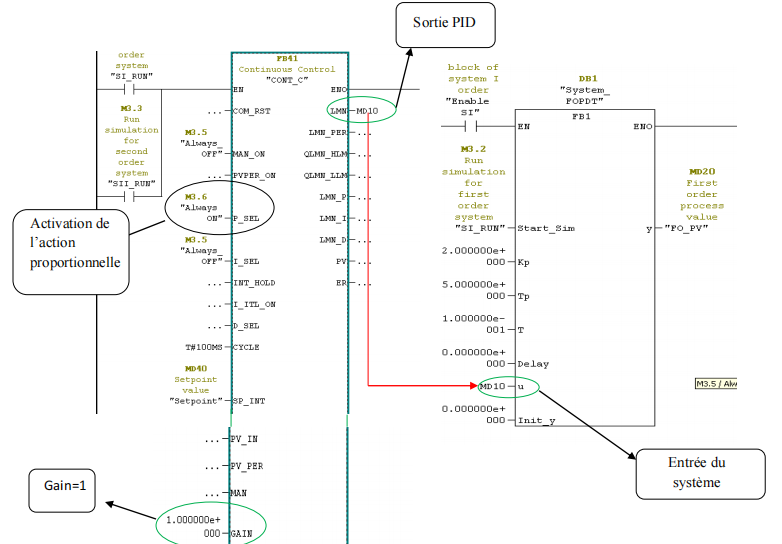
Fig.V.3 Schéma bloc d’une boucle ouverte de système du 1er ordre sous step7
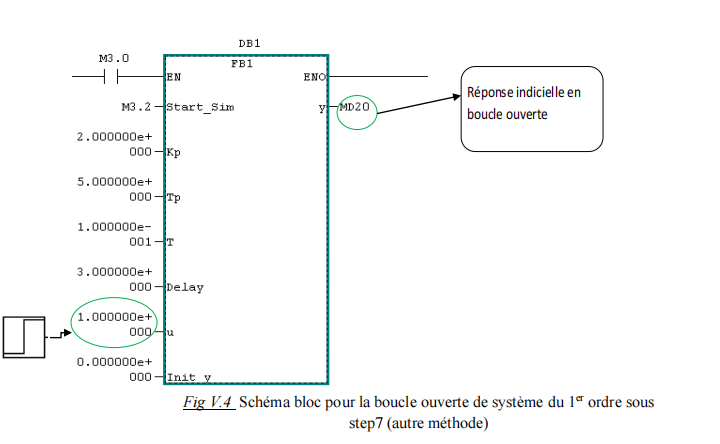
Fig.V.4 Schéma bloc pour la boucle ouverte de système du 1er ordre sous step7 (autre méthode)
V.1.4-Réponse du système du 1er ordre en boucle ouverte sous WinCC
V.1.5-Réponse du système du 1er ordre en boucle fermée sous MATLAB (sans retard)
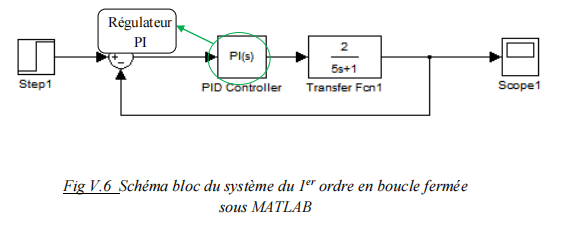
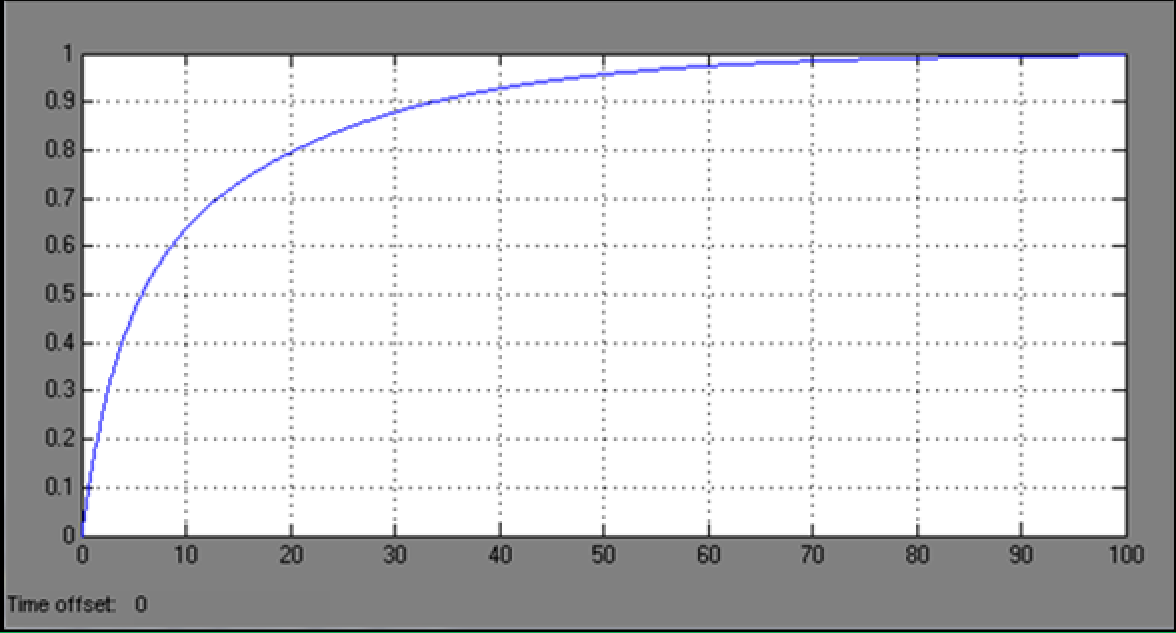
Fig.V.7 Réponse du système du 1er ordre en boucle fermée sous MATLAB
V.1.6-Réponse du système du 1er ordre en boucle fermée sous STEP7 (sans retard)
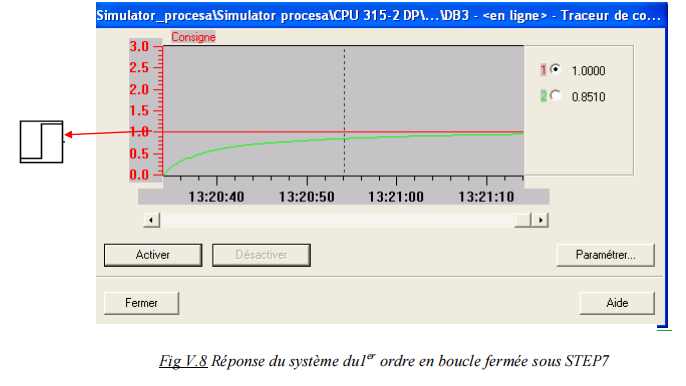
V.1.7-Réponse du système du 1er ordre en boucle fermée sous WinCC (sans retard)
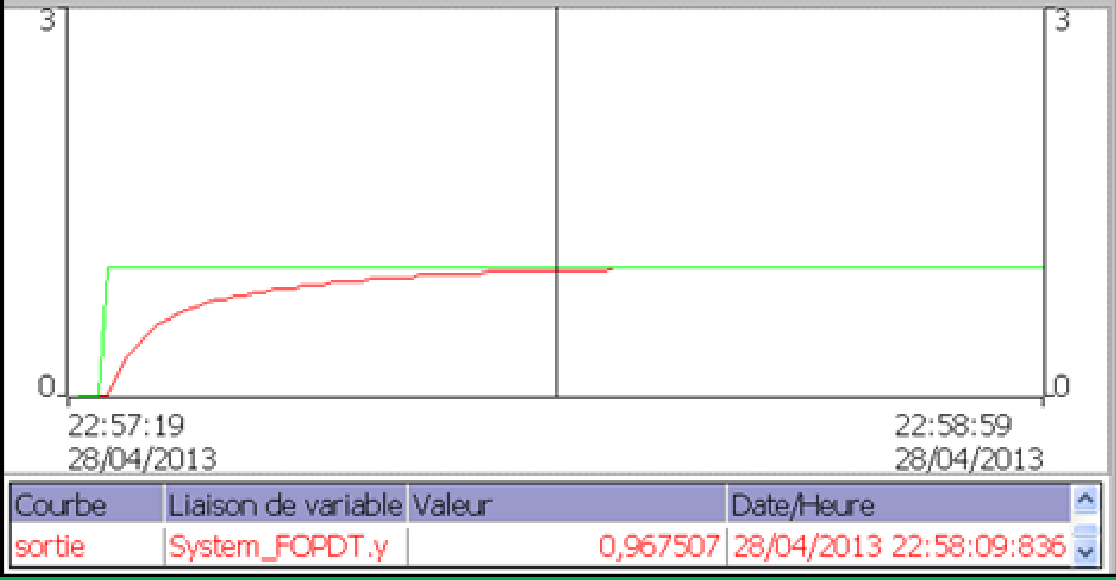
Fig.V.9 Réponse du système du 1er ordre en boucle fermée sous WinCC
V.1.8-Réponse du système du 1er ordre en boucle fermée sous MALAB (avec retard de 2s)
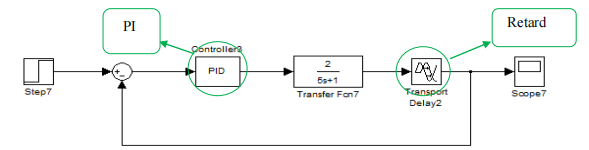
Fig V.10 Schéma bloc du système du 1er ordre avec retard en boucle fermée sous MATLAB
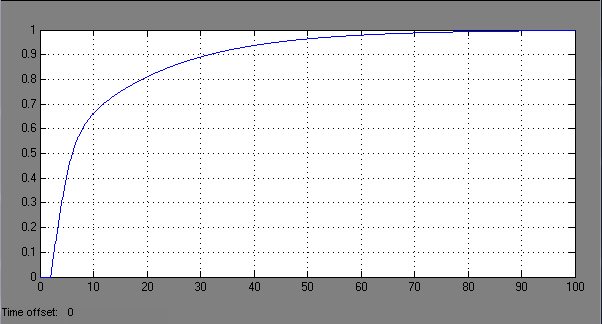
Fig.V.11 Réponse du système du 1er ordre en boucle fermée avec retard sous MATLAB
V.1.9-Réponse du système du 1er ordre en boucle fermée sous STEP7 (avec retard de 2s)
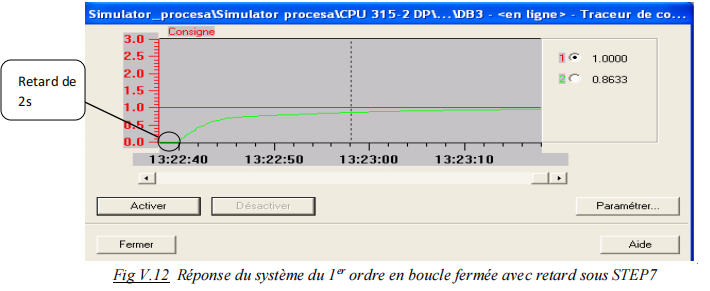
Fig.V.12 Réponse du système du 1er ordre en boucle fermée avec retard sous STEP7
V.1.10-Réponse du système du 1er ordre en boucle fermée sous WinCC (avec retard de 2s)

Fig.V.13 Réponse du système du 1er ordre en boucle fermée avec retard sous WinCC
Remarque
Nous avons remarqué que les réponses de système 1er ordre avec ou sans retard sont les mêmes sous MATLAB, STEP7 et WinCC.
V.2-Réponse du système du 2éme ordre avec et sans retard
Fig.V.14 Fonction de transfert du système du 2eme ordre
V.2.1-Paramétres de la fonction de tarnsfert du 2eme ordre
Kp=1 ; ξ=0.07 ; Wn=1.41rad/s.
V.2.2-Ajustage des gains de régulateur P, PI, PID selon la méthode de ZIEGLER_-NICHOLS
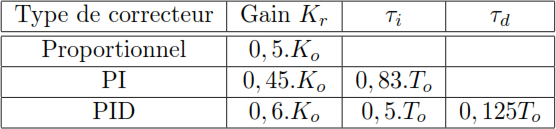
Fig.V.15 Ajustage des gains de régulateur P, PI, PID selon la méthode de ZIEGLER_-NICHOLS
- Régulateur PI
To=2*π/w0=4.45s
Kr=0.45*1=0.45
Ti=0.83*4.45=3.69s
Ki=1/Ti=1/3.96=0.25
- Donc les paramétres de PI sont:
PI : proportionel intégrateur.
Kr=0.45 Kr : le gain de PI.
Ti=3.69s Ti : le temps d’intégration de PI.
- Régulateur PID
To=2*π/w0=4.45s
Kr=0.6*1=0.6
Ti=0.5*4.45=2.225s
Ki=1/Ti=1/2.225=0.45
Td=0.125*4.45=0.5565s
Kd=1/Td=1/0.5565=1.797
- Donc les paramétres du PID sont :
PID : proportionel intégral dérivée .
Kr=0.6 Kr : le gain du PID.
Ti=2.225s Ti : le temps d’intégration du PID.
Td=0.5565s Td : le temps de dérivation du PID.
V.2.3-Réponse du système du 2eme ordre en boucle ouverte sous MATLAB

Fig.V.16 Schéma bloc du système du 2eme ordre en boucle ouverte sous MATLAB
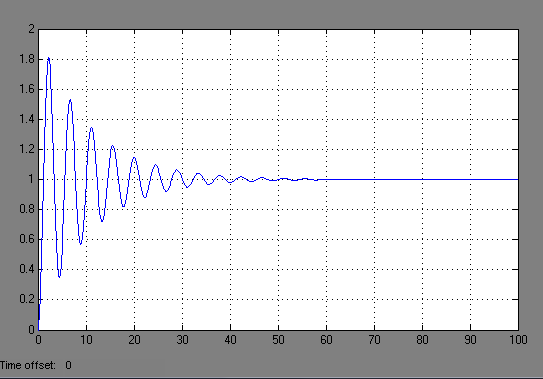
Fig.V.17 Réponse du système du 2eme ordre en boucle ouverte sous MATLAB
V.2.4-Réponse du système du 2eme ordre en boucle ouverte sous WinCC
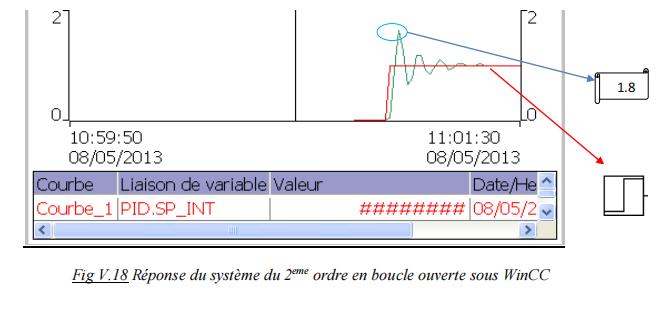
Fig.V.18 Réponse du système du 2eme ordre en boucle ouverte sous WinCC
V.2.5-Réponse du système du 2eme ordre avec PID en boucle fermée sous MATLAB (sans retard)

Fig.V.19 Schéma bloc du système du 2eme ordre en boucle fermée sous MATLAB
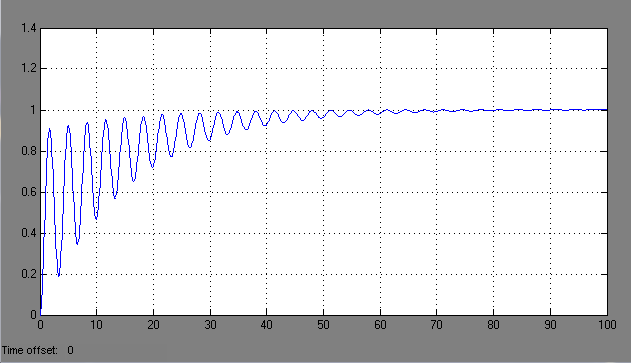
Fig.V.20 Réponse du système du 2eme ordre en boucle fermée avec PID sous MATLAB
V.2.6-Réponse du système du 2eme ordre avec PID en boucle fermée sous STEP7 (sans retard)
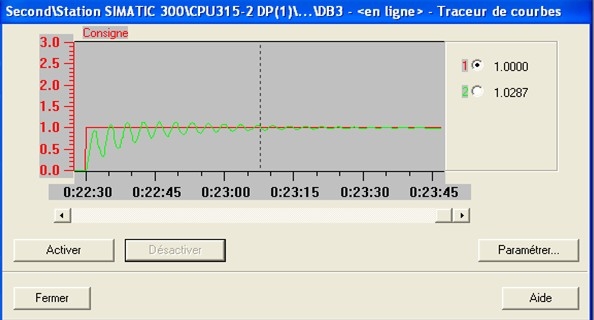
Fig.V.21 Réponse du système du 2eme ordre en boucle fermée avec PID sous STEP7
V.2.7-Réponse du système du 2eme ordre avec PID en boucle fermée sous WinCC (sans retard)
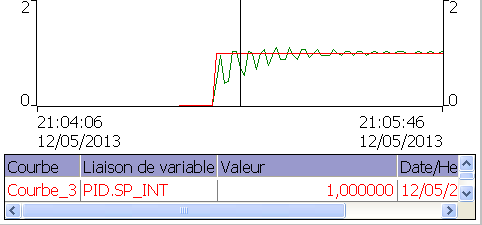
Fig.V.22 Réponse du système du 2eme ordre en boucle fermée avec PID sous WinCC
V.2.8-Réponse du système du 2eme ordre avec PI en boucle fermée sous MATLAB (sans retard)
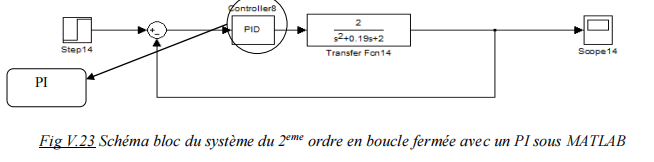
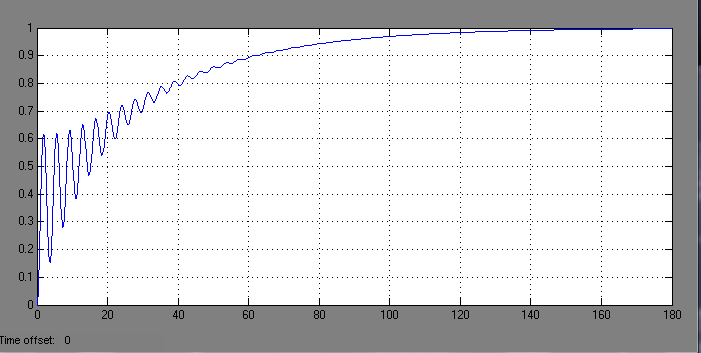
Fig.V.24 Réponse du système du 2eme ordre en boucle fermée avec PI sous MATLAB
V.2.9-Réponse du système du 2eme ordre avec PI en boucle fermée sous STEP7(sans retard)
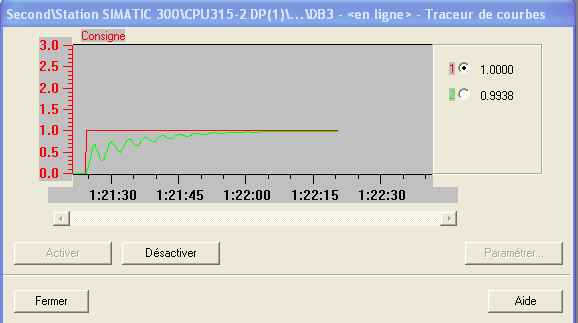
Fig.V.25 Réponse du système du 2eme ordre en boucle fermée sous STEP7
V.2.10-Réponse du système du 2eme ordre avec PI en boucle fermée sous WinCC(sans retard)
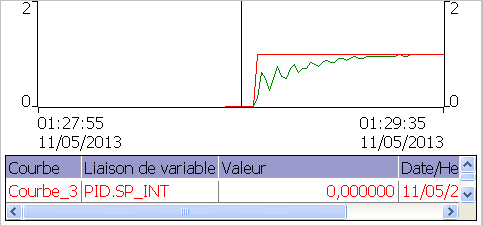
Fig.V.26 Réponse du système du 2eme ordre en boucle fermée avec PI sous WinCC
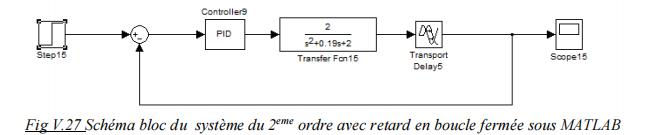
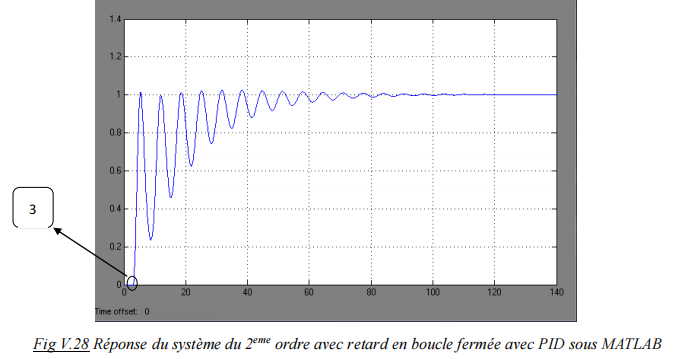
V.2.11-Réponse du système du 2eme ordre avec PID en boucle fermée sous MATLAB (avec retard de 3s)
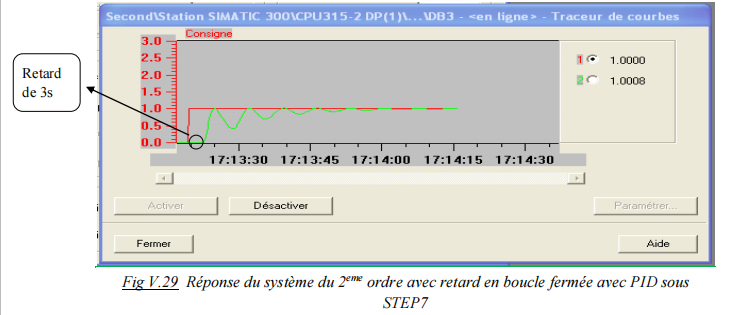
V.2.12-Réponse du système 2eme ordre avec PID en boucle fermée sous STEP7 (avec retard 3s)
V.2.13-Réponse du système 2eme ordre avec PID en boucle fermée sous winCC (avec retard de 3s)
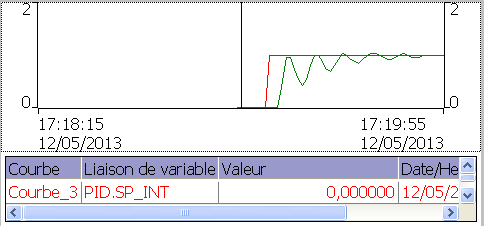
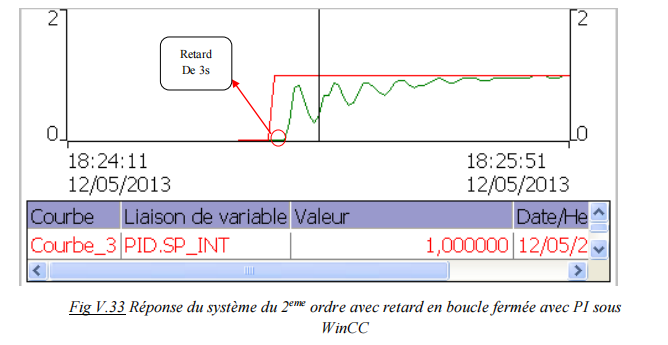
Fig.V.30 Réponse du système du 2eme ordre avec retard en boucle fermée avec PID sous WinCC
V.2.14-Réponse du système du 2eme ordre avec PI en boucle fermée sous MATLAB (avec retard de 3s)

Fig.V.31 Réponse du système du 2eme ordre avec retard en boucle fermée avec PI sous MATLAB
V.2.15-Réponse du système 2eme ordre avec PI en boucle fermée sous STEP7 (avec retard de 3s)
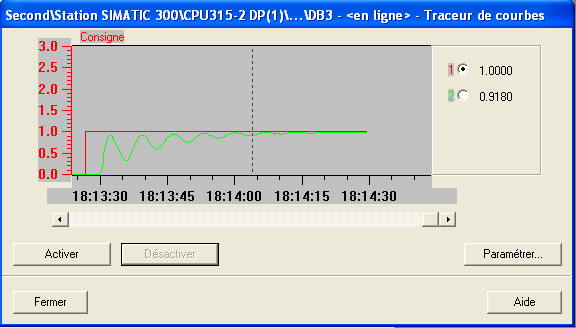
Fig.V.32 Réponse du système du 2eme ordre avec retard en boucle fermée avec PI sous STEP7
V.2.16-Réponse du système du 2eme ordre avec PI en boucle fermée sous WinCC (avec retard de 3s)
Remarque
Nous avons remarqué les mêmes résultats de simulation sous MATLAB, STEP7 et WinCC les résultats sont les mêmes.
V.3-Réponse du système du 3éme ordre avec et sans retard
V.3.1-Fonction de transfert
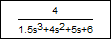
Fig.V.34 Fonction de transfert du système du 3eme ordre
Les paramètres sont :
Kp=0.81 ; Tp=1.5s ; wn=2.45 rad/s; ξ=0.4
V.3.2-Ajustement des gains du régulateur PI

- Kr=0.45*0.81=0.364
- To=2*π/w=2.45s
- Ti=0.83*2.45=2.12s donc Ki=1/Ti=1/2.12=0.47
Donc les paramètres sont :
- Kr=0.364
- Ti=2.12s
V.3.3-Réponse du système du troisième ordre en boucle ouverte sous MATLAB

Fig.V.35 Schéma bloc du système du 3eme ordre en boucle ouverte sous MATLAB
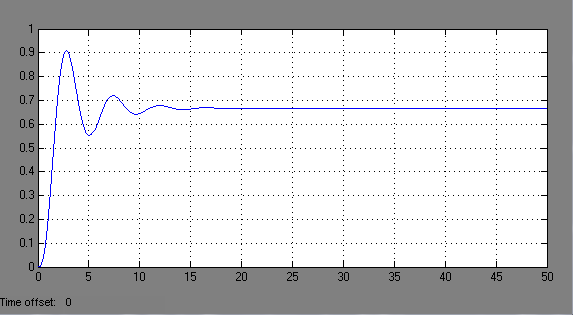
Fig.V.36 Réponse du système du 3eme ordre en boucle ouverte sous MATLAB
V.3.4-Réponse du système du troisième ordre en boucle ouverte sous winCC
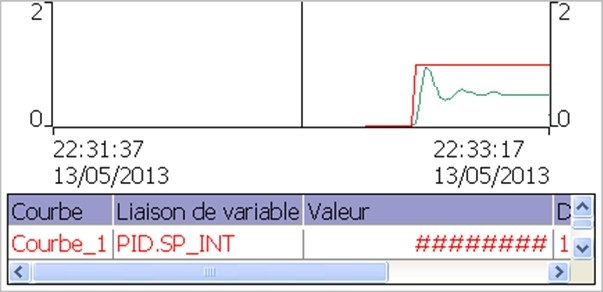
Fig.V.37 Réponse du système du 3eme ordre en boucle ouverte sous WinCC
V.3.5-Réponse de système du troisième ordre en boucle fermée sous MATLAB (sans retard)

Fig V.38 Schéma bloc du système du 3emeordre en boucle fermée sous MATLAB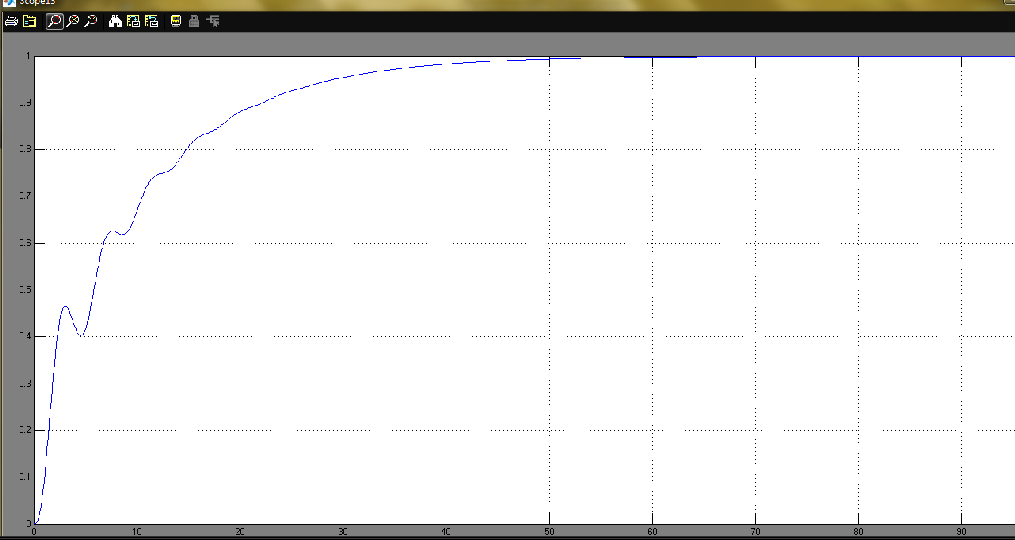
Fig.V.39 Réponse du système du 3eme ordre en boucle fermée sous MATLAB
V.3.6 Réponse du système du troisième ordre en boucle fermée sous step7 (sans retard)
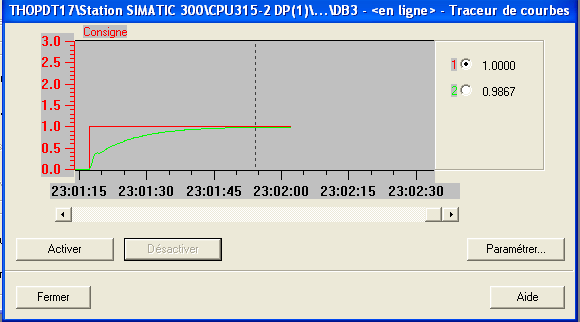
Fig.V.40 Réponse du système du 3eme ordre en boucle fermé sous STEP7
V.3.7-Réponse du système du troisième ordre en boucle fermée sous WinCC (sans retard)
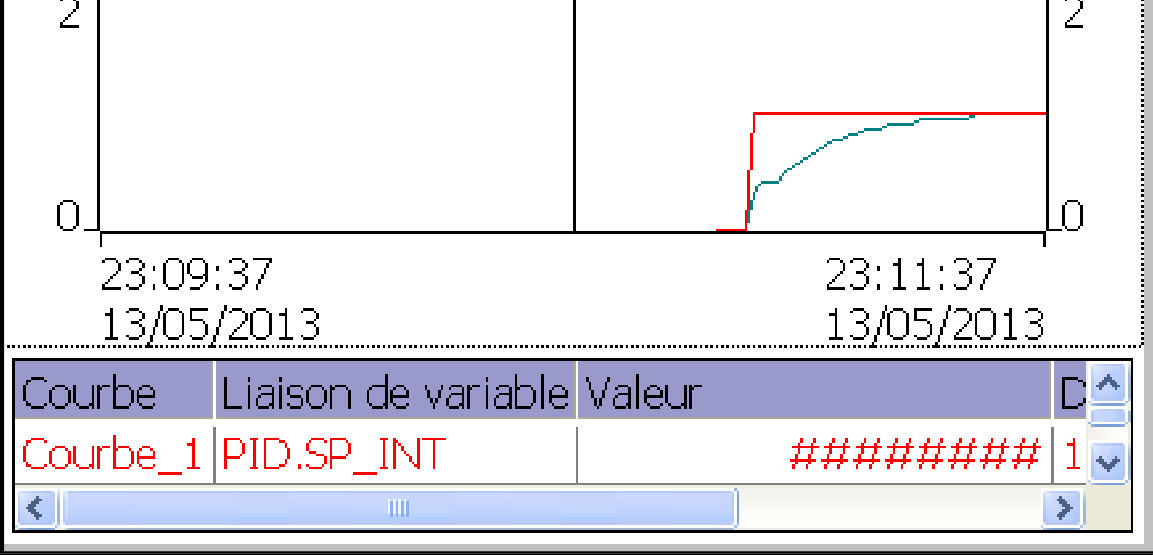
Fig.V.41 Réponse du système du 3eme ordre en boucle fermé sous WinCC
V.3.8-Réponse du système du troisième ordre en boucle fermée sous MATLAB (avec retard de 2s)

Fig.V.42 Schéma bloc du système du 3eme ordre en boucle fermée sous MATLAB
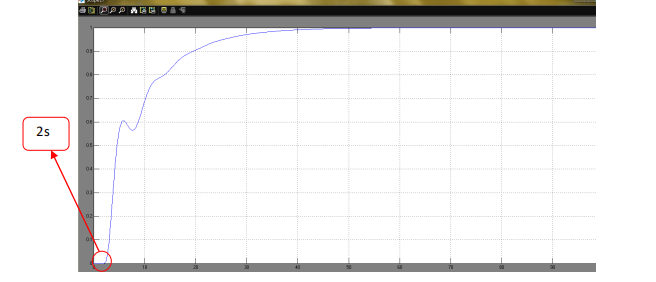
Fig.V.43 Réponse du système du 3eme ordre en boucle fermé avec retard sous MATLAB
V.3.9 Réponse du système du troisième ordre en boucle fermée sous STEP7 (avec retard de 2s)
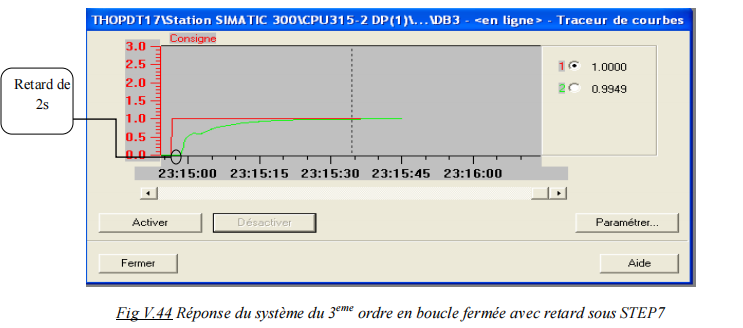
Fig.V.44 Réponse du système du 3eme ordre en boucle fermée avec retard sous STEP7
V.3.10-Réponse du système du troisième ordre en boucle fermée sous winCC (avec retard de 2s)
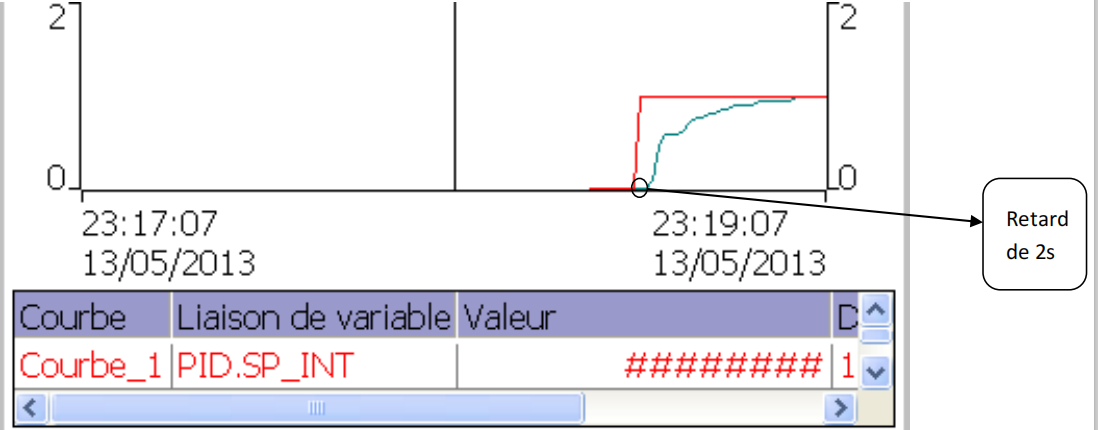
Fig.V.45 Réponse du système du 3eme ordre en boucle fermé avec retard sous winCC
Remarque
Pour le système du 3eme ordre avec et sans retard on a remarqué les mêmes résultats de simulation sous MATLAB, STEP7 et winCC.
5.4. Conclusion
Dans ce chapitre nous avons présenté les trois systèmes 1ers et 2eme et 3eme ordre avec un PID classique et leurs résultats sous MATLAB, STEP7, WinCC. Les résultats obtenus sont comparables.
Le chapitre suivant montre les différents résultats de simulation des 3 systèmes avec un contrôleur flou de type PI- Sugeno toujours sous MATLAB, STEP7 et WinCC.
Conclusion Générale
Le travail apporté dans ce mémoire vise la spécification d’un cadre applicatif pour l’implémentation d’une boucle de régulation sous Step7 et WinCC, et mettre en place un contrôleur basé sur la logique floue dans un automate capable de contrôler des systèmes linéaires.
Les résultats que nous avons décrits dans ce mémoire sont très satisfaisants. Nous avons étudié en simulation l’application d’une telle commande à différents modèles de processus, puis de faire une comparaison avec la commande numérique PID des mêmes procédés.
Dans ce cadre, les principales contributions de ce mémoire sont regroupées en trois parties : La première partie est l’implémentation d’une boucle de régulation avec le PID classique. Les points essentiels de cette partie sont :
- Création des blocs des systèmes 1er, 2eme et 3eme ordre sous step7.
- Simulation sous step7 et Matlab, puis faire la comparaison.
Dans la deuxième partie, la mise en œuvre du contrôleur flou ; y a compris :
- La conception du système flou avec le langage SCL sous step7.
- Le teste des performances du controleur flou avec l’outil Fuzzy Logic de Matlab.
La troisième partie a consacré à la comparaison de la commande floue avec la commande numérique PID.