
Domaines d’application et mouvements du quadrotor
Domaines d’application des quadrotors
L’utilisation des quadrotors n’a cessé de progresser ces dernières années, notamment dans les applications de loisir. Mais dans les domaines professionnels cette progression est encore plus flagrante [12].
Avec ses 4 moteurs, le drone quadrotor apporte des possibilités d’embarquement de caméras, appareils photos et autres capteurs pour réaliser des missions aériennes d’acquisition de données, là où des moyens conventionnels sont trop onéreux ou trop compliqués voire impossibles à mettre en œuvre.
Par ses capacités à rester en vol stationnaire ou à évoluer selon des trajectoires complexes, le drone quadrotor devient un outil privilégié utilisé dans plusieurs domaines tel que:
Domaine de sécurité
Les quadrotors sont utilisés par les services de secours (police, sapeurs-pompiers et gendarmerie) pour l’évaluation des dégâts en cas de catastrophe naturelle afin de prendre des informations stratégiques sur des interventions en hauteur et délicates.
(exemples: victimes d’avalanches, victimes d’inondations et de tremblement de terre, repérage des feux de forêts, l’exploration des zones radioactives, les volcans etc…)
Inspection des ouvrages d’art tels les ponts, les viaducs, les barrages.
La surveillance maritime (voies maritimes, trafic de drogue, détection des pollutions par hydrocarbures, la surveillance urbaine, des manifestations, ainsi que les frontières).
missions militaires de reconnaissance et support de combat.
Domaine civil
Dans le domaine civil, les quadri-rotors sont conçue pour explorer des situations difficiles d’accès, comme des montagnes, des canyons. Ils serviraient à faire prises de vue aériennes inédites et des vidéos pour des chaînes télé comme (des reportages sur des lieux isolés de la terre, des documentaires, films, etc..).
Inspection des ouvrages d’art tels les ponts, les viaducs, les barrages.
Etudes scientifiques (topographie et cartographie, Étude de l’atmosphère, des sols (géologie) et des océans).
Transport et livraisons des produits légères sur de courtes distances comme (Les colis postaux, boites de pizza, etc…).
Description général du quadrotor
Un quadrotor est un robot mobile aérien à quatre rotors définit par six degrés de liberté dans l’espace (3 axes X, Y, Z) Figure 17. [1-2].
Ces 4 rotors sont généralement placés aux extrémités d’une croix, et l’électronique de contrôle est habituellement placée au centre de la croix.
Afin d’éviter à l’appareil de tourner sur lui-même sur son axe de lacet, il est nécessaire que deux hélices tournent dans un sens, et les deux autres dans l’autre sens.
Pour pouvoir diriger l’appareil, il frauder que chaque couple d’hélice tournant dans le même sens soit placé aux extrémités opposées d’une branche de la croix.
Le fonctionnement d’un quadrotor est assez particulier.
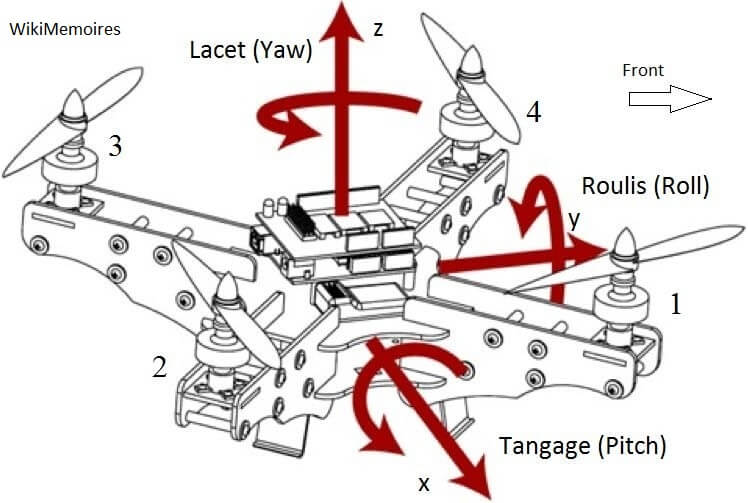
Figure 1.7 : Les mouvements de bases du quadrotor.
En faisant varier astucieusement la puissance des moteurs, il est possible de le faire monter/descendre, de l’incliner à gauche/droite (roulis) ou en avant/arrière (tangage) ou encore de le faire pivoter sur lui-même (lacet) [3].
Le quadrotor a six degrés de libertés, trois mouvements de rotation et trois mouvements de translation, ces six degrés doivent être commandés à l’aide de quatre déclencheurs seulement;
Donc c’est un système sous actionné (le nombre des entrées inférieure au nombre des sorties).
Les mouvements du quadrotor
Dans les hélicoptères classiques, quand le rotor principal tourne, il produit un couple réactif qui inciterait le corps de l’hélicoptère à tourner dans la direction opposée si ce couple n’est pas contrarié.
Ceci est habituellement fait en ajoutant un rotor de queue qui produit une poussée dans une direction latérale.
Cependant, ce rotor avec son alimentation électrique associée ne fait aucune contribution à la poussée.
Par contre, en cas de quadrotor, le rotor droit et le rotor gauche tournent dans le sens des aiguilles d’une montre et dans la direction opposée les rotors avant et arrière, ceci neutralise effectivement le couple réactif non désiré et permet au véhicule de planer sans tourner hors de la commande.
D’ailleurs, différemment aux hélicoptères classiques, toute l’énergie dépensée pour contrecarrer le mouvement de rotation contribue à la force de poussée [4-11].
Les mouvements de base de quadrotor sont réalisés en variant la vitesse de chaque rotor changeant de ce fait la poussée produite. Le quadrotor incline vers la direction du rotor plus lent, qui tient compte alors de la translation le long de cet axe.
Par conséquent, comme à un hélicoptère classique, les mouvements sont couplés, signifiant que le quadrotor ne peut pas réaliser la translation sans roulement ou tangage, ce qui signifie qu’un changement de la vitesse d’un rotor se traduit dans un mouvement en au moins trois degrés de liberté.
Par exemple, augmentant la vitesse de propulseur gauche aura comme conséquence un mouvement de roulis (le quadrotor incline vers le rotor plus lent, vers la droite).
Un mouvement de lacet (l’équilibre entres les rotors qui tourne dans le sens des aiguilles d’une montre et les rotors qui tourne dans le sens inverse est perturbé ayant pour résultat un mouvement de rotation horizontal), et une translation (le mouvement de roulis incline l’armature et avec lui, l’orientation de la force de poussée).
Cet accouplement est la raison pour laquelle nous pouvons commander les six degrés de liberté de quadrotor avec seulement quatre commandes (le couple appliqué par les moteurs sur chaque propulseur).
Le quadrotor a cinq mouvements principaux :
- Mouvement vertical (Throttle),
- Mouvement de roulis (Roll),
- Mouvement de tangage (Pitch),
- Mouvement de lacet (Yaw) et
- Translations horizontales.
Le mouvement vertical (Throttle)
Afin de planer, toute la force de portance devrait seulement être le long de l’axe z avec une grandeur exactement opposée à la force de pesanteur.
D’ailleurs, la force de portance crée par chaque rotor doit être égale pour empêcher le véhicule de renverser plus.
Par conséquent, la poussée produite par chaque rotor doit être identique.
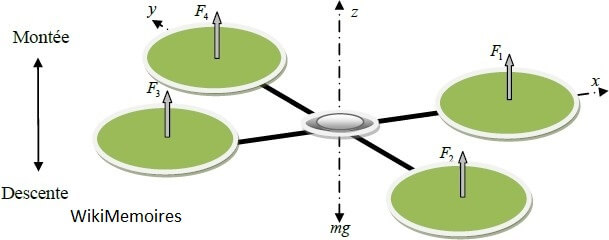
Figure 1.8 : Illustration du mouvement vertical (Throttle).
Le mouvement ascendant et descendant est obtenu par la variation de la vitesse de rotation des moteurs (par conséquence la poussée produite), si la force de portance est supérieure au poids du quadrotor le mouvement est ascendant, et si la force de portance est inférieure au poids du quadrotor le mouvement est descendant.
Le mouvement de roulis (Roll)
La Figure 1.9 montre bien comment un mouvement de roulis est obtenu. Dans ce cas, on applique un couple autour de l’axe x, c’est-à-dire en appliquant une différence de poussée entre les rotors (1, 2) et les rotors (3, 4).
Ce mouvement (rotation autour de l’axe x) est couplé avec un mouvement de translation selon l’axe y.
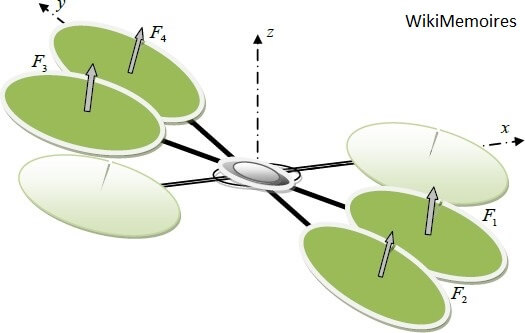
Figure 1.9 : Illustration du mouvement de roulis (Roll).
Le mouvement de tangage (Pitch)
La Figure 1.10 montre comment un mouvement de tangage est obtenu. Dans ce cas, on applique un couple autour de l’axe y, c’est-à-dire en appliquant une différence de poussée entre le rotor (1, 4) et les rotors (2, 3).
Ce mouvement (rotation autour de l’axe y) est couplé avec un mouvement de translation selon l’axe x.
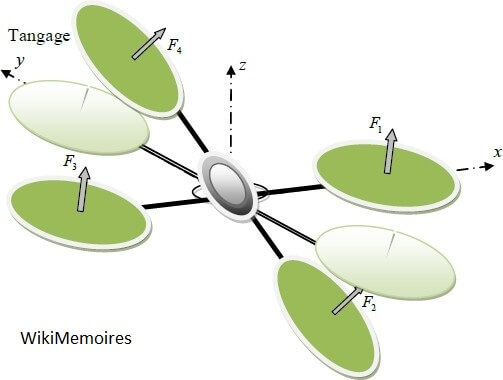
Figure 1.10 : Illustration du mouvement de tangage (Pitch).
Le mouvement de lacet (Yaw)
La Figure 1.11 montre comment le mouvement de lacet est obtenu. Dans ce cas, nous voulons appliquer un couple autour de l’axe z, qui est fait en appliquant une différence de vitesse entre les rotors (1,3) et (2,4).
Ce mouvement n’est pas un résultat direct de la poussée produit par les propulseurs mais par les couples réactifs produits par la rotation des rotors.
La direction de la force de poussée ne décale pas pendant le mouvement, mais l’augmentation de la force de portance dans une paire de rotors doit être égale à la diminution des autres paires pour s’assurer que toute la force de poussée demeure la même.
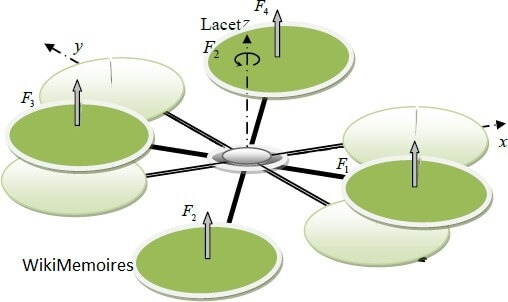
Figure 1.11 : Illustration du mouvement de lacet (Yaw).
Le mouvement de translation horizontale
La Figure 1.12 montre comment la translation horizontale est réalisée.
Dans ce cas, nous voulons appliquer une force le long de x ou de y qui est fait en inclinant le corps (par le tangage ou le roulement) et en augmentant toute la poussée produite pour garder l’importance du composant de z de la poussée égale à la force de pesanteur.
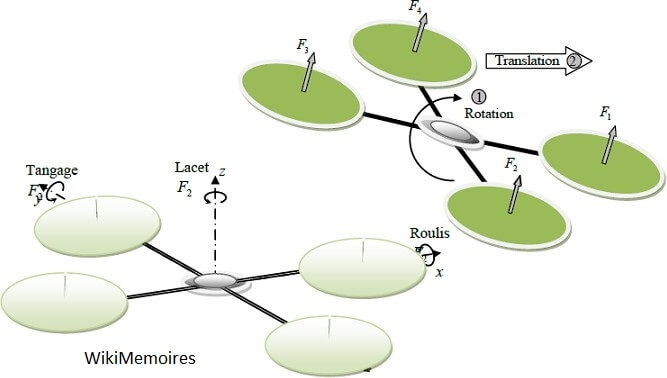
Figure 1.12 : Illustration du mouvement de translation horizontale.
Conclusion
Ce chapitre permet au lecteur d’avoir des concepts préliminaires sur les différentes catégories des robots volants plus particulièrement les quadrotors et leur principe de fonctionnement.
Dans le chapitre suivant nous donnons plus de détaille sur les paramètres dynamiques affectant l’orientation du quadrotor, les équations mathématiques et la modélisation de Newton-Euler.