
Le hardware utilisé dans la réalisation du quadrotor (contrôleur de vol du drone)
Conception et mise en œuvre du fonctionnement
Introduction
Le but de ce chapitre est de donner une description globale du principe de fonctionnement des différentes parties de notre système.
En expliquant le hardware que j’ai utilisé pour ce projet (la réalisation du quadrotor) et comment je me suis installé avec des outils et des instruments électroniques de base pour réaliser le contrôleur de vol du drone, le transmetteur RF et le récepteur.
Je vais également donner une explication détaillée sur la partie software utilisé pour ce projet, passant au processus de construction étape par étape.
Description du hardware utilisé
Les quadrotors sont des systèmes complexes, qui exigent des composants et une instrumentation varié qui doit être à la fois de haute performance et de poids allégés.
Ici on va introduire les plus importants :
Arduino Uno
Un Arduino Uno Figure 3.1, c’est le composant le plus simple pour commencer avec, il me donne beaucoup de couvert pour continuer à développer mon propre contrôleur de vol du quadrotor.
Car il s’agit d’un PCB à double face professionnelle avec des faibles interférences et bruits, donc il convient bien pour le vol.
Alors je pourrais utiliser un Arduino pro mini pour cela, mais le problème c’est que l’alimentation sur un pro mini est basée d’un régulateur MIC5205, qui ne peut fournir qu’un 150mA avec un bon refroidissement.
Donc pour garder les choses sur le côté sûr, j’ai utilisé un Arduino Uno pour la réalisation du contrôleur de vol.
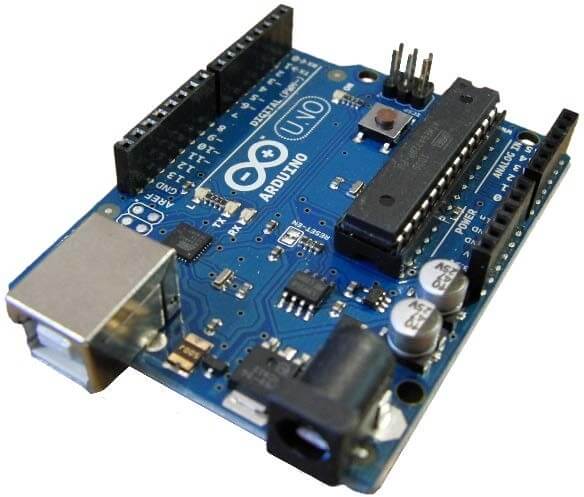
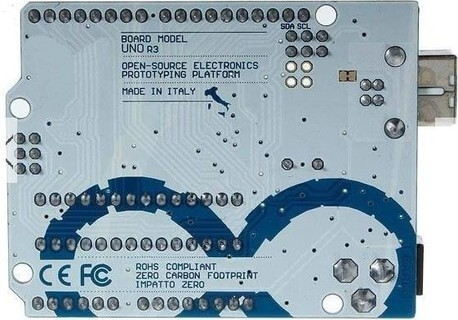
Figure 3.1 : la carte Arduino Uno.
Arduino Uno, est une carte de développement « Open-Source Hardware » peu coûteuse, ce qui signifie que tout le monde est libre de télécharger les fichiers de conception et de tourner sa propre version du conseil de développement populaire.
Il est basé sur un microcontrôleur ATmega en 8-bit et Il contient tout le nécessaire pour supporter le microcontrôleur;
Il suffit de le connecter à un ordinateur avec un câble USB ou de l’alimenter avec un adaptateur AC-DC ou une batterie pour le démarrer.
Dans le cadre de ce projet le traitement séquentiel des instructions de programme est important, on utilise souvent les interruptions des pates d’entrés de l’Arduino Uno pour lire les signaux de commande venant du récepteur radio aussi en utilise les sorties PWM de l’Arduino Uno pour commander la rotation des moteurs brushless via les ESC.
Finalement l’utilisation du protocole de communication I2C permet de lire les données provenant de Gyro, de sorte que nous pouvons agir sur la stabilité du drone.
Gyroscope MPU-6050
Nous avons seulement besoin de corriger le mouvement indésirable du quad rotor, le Gyro c’est le capteur idéal de notre projet.
J’ai choisi le MPU-6050 Figure 3.2, car il est très facile à obtenir, il est également très bon marché et il détient d’un accéléromètre et un gyroscope (drone) à la fois, ceci est très pratique lors de la programmation d’une IMU.
La centrale inertielle ou l’IMU est un ensemble de capteurs qui peut être installé au bord de n’importe quel corps mobile pour lire les données des mouvements de ce corps.
Ce type de puce est en réalité ce qu’on appelle un micro système électromécanique ou un MEMS pour abrégé, ceci est rien d’autre que des capacités qui varient en fonction de l’accélération et de la vitesse angulaire.
Donc pour notre cas, nous pourrons déterminer et traité les mouvements du quad rotor dans l’espace. L’interface du module MPU-6050 avec Arduino se fait aux broches (SCL et SDA) à l’intermédiaire d’une liaison I2C.
Figure 3.2 : Unité de Mesure de l’Inertie gyroscopique MPU-6050.
Le mouvement angulaire sur le quadrotor est partout le même. Donc, peu importe où se trouve le gyroscope (drone). Mais c’est toujours une bonne idée de monter le gyroscope au centre de gravité du quad où les vibrations sont les plus faibles.
Les moteurs sans balais ou les moteurs Brushless
Dans le cadre de ce projet, j’ai besoin des moteurs de petite masse et à la fois de très haute vitesse avec un rapport couple-masse élevée.
Pour cela je suis obligé de travaillé avec les moteurs sans balais ou « Brushless BLDC motor« . Comme le montre la Figure 3.3.
Les moteurs brushless sont en fait un type de moteur synchrone à aimants permanents tourne avec un courant alternatif triphasé AC.
Ils présentent de nombreux avantages par rapport aux moteurs DC classiques à savoir, leurs longues durées de fonctionnement et leurs insensibilités aux parasites en plus leurs réponses dynamiques élevées.
Ce type de moteur, c’est ce qui fait tourner et générer de la poussée pour permettre au drone de voler.
Dans le cas des multirotors, les moteurs génèrent une poussée vers le haut qui maintient le drone comme un quadcopter volant. Autrement dit, un moteur sans balai contient un ensemble d’électroaimants (bobines) qui sont reliés ensemble dans des paires spécifiques.
Ces électroaimants sont connectés en trois sections principales, de sorte que le moteur brushless comporte trois fils sortants, Figure 3.4.

Figure 3.3 : Moteur Brushless EMAX XA2212 1400Kv.
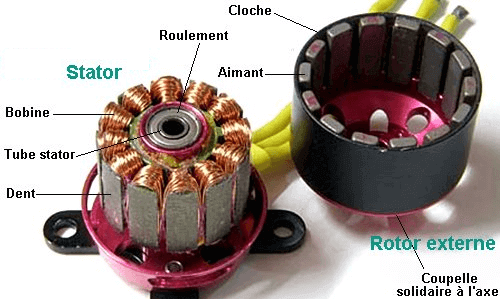
Figure 3.4 : Composantes interne du Moteur Brushless.
Le moteur sans balais se compose de deux sections principales :
- Rotor : la partie qui tourne et a les aimants montés sur un motif radial.
- Stator : la partie qui ne tourne pas, et dispose d’électroaimants.
J’utilise pour ce projet quatre moteurs de la marque EMAX XA2212 1400Kv, ces moteurs ont 27.9 mm de diamètre et 43.16 mm de longueur, ils pèsent 51g et ils consomment une puissance de 197 Watts avec un courant max de 16.4A.
Le KV veut dire la vitesse de rotation du moteur pour 1 volt. Il indique le nombre de tour/minute/volt du moteur à vide.
Dans notre cas, le circuit de puissance qui contient les moteurs fonctionne sur un voltage nominal de 11.1 volts, donc pour cela avec 1400 KV sous 11.1 volts chaque moteur peut effectuer jusqu’à 15540 tours/minute s’il est à vide c’est ce qui est appeler rotation par minute RPM.
Electronique Speed Controller « ESC »
ESC signifie Electronique Speed Controller Figure 3.5, c’est un circuit électronique qui gère la vitesse des moteurs brushless. Sur un multi-rotor, chaque moteur obtient son propre ESC, dont chacun se connecte au contrôleur de vol.
Les ESC converties les séquences des signaux de commande PWM venant du contrôleur de vol ou du récepteur radio en un signal alternatif triphasé, et entraîne le moteur brushless en fournissant le niveau d’énergie électrique approprié.

Figure 3.5: variateur de vitesse « Hobbywing OPTO ESC 20A ».
Les ESCs utilisés pour ce projet sont de la série hobbykings 20A spécialement conçus pour les multirotors, ils ont un large éventail de fonctions de programmation combinés avec une courbe d’accélération linéaire.
L’ESC doit supporter un ampérage au moins égal à l’ampérage max des moteurs.
Généralement on prend un ESC d’ampérage un peu supérieur afin qu’il ne chauffe pas. Dans mon cas les moteurs brushless consomment 16.4A pour une max poussée « Thrust », j’ai choisie à prendre un ESC de 20A afin de garder un peu de marge de sécurité.
Batterie LIPO
Notre système quadrotor besoin beaucoup d’énergie et a besoin d’une source d’alimentation puissante et en plus légère, pour cela je suis obligé de travailler avec la batterie du Lithium-Polymère Figure 3.6.
Les batteries Lithium-Polymère sont des batteries chimiques très puissantes et assez légère pour le bon vol du quadrotor.
En plus elle inclut un circuit de protection (PCM) qui protège la batterie contre les charges et décharges excessives et des court-circuités ou d’explosée [14].

Figure 3.6 : Batterie de Lithium-Polymère « LIPO » 11.1V 70C 2.2Ah.
J’ai utilisé pour ce projet une batterie LIPO de 3 cellules et d’une capacité de 2200mAh à 11.1 volts avec un Taux de décharge « C Rating » de 70C et un poids de 225g.
Le Taux de décharge est une façon informelle de décrire la quantité de courant que la batterie peut fournir en toute sécurité.
Le C se réfère à la capacité de la batterie et à l’amplitude des heures. Dans notre cas cette batterie de 70C peut fournir jusqu’à 70 × 2.2Ah = 154 ampères dans une heure.
Les hélices
Concernant les hélices, il faut les choisir en fonction de la taille des moteurs et du châssis du quadrotor utilisé. J’ai choisi les DJI 8045 comme le montre la Figure 3.7.
Ces hélices sont fabriquées avec la fibre de carbone qui est une matière résistante et légère, elles ont 8 pouces (20 cm) de diamètre et un pas de tangage de 4.5 pouces (un pas de tangage signifie combien de distance que le quadrotor va aller de l’avant pour une révolution à 360 degrés de l’hélice).

Figure 3.7 : Hélices DJI 8045.
Comme déjà dit dans le chapitre 1, on prendra deux de sens horaire et deux de de sens anti horaire en direction de la palme, ces hélices seront fixé aux moteurs et leur rôle sera de brassé l’aire pour générer la force de poussée.
La taille de l’hélice varie avec la puissance du moteur, pour bien comprendre voici quelques règles à respecter pour le bon choix des différents accessoires :
Plus une hélice est petite, plus elle a besoin de tourner vite pour être efficace, plus elle est grande, moins elle a besoin de tourner vite.
Sur un gros modèle d’avion par exemple, une petite hélice même tournant très vite (beaucoup de KV), il ne suffira pas à le faire voler correctement (pas assez puissante).
Donc il faudra l’équiper d’une grande hélice, qui aura besoin de tourner moins vite (moins de KV).
Les grandes hélices consommant plus que les petites hélices, une grande hélice devra être montée sur un moteur puissant (beaucoup de watt) et vice versa. P(Watt) = U(Volt) × I(A)
I(A) : le courant max qui doit être délivré par l’ESC au moteur brushless.
U(Volt) : la tension continue de la batterie LIPO.
P(Watt) : la puissance max admise par le moteur brushless.
En général : un moteur avec fort KV, prévue pour petite hélice qui consomme peut a peu de Watts ; et inversement : moteur avec faible KV, prévu pour grande hélice qui va consommer beaucoup a beaucoup de Watts.
Arduino Nano
L’Arduino Nano est une carte petite, complète et facile à utiliser basée sur l’ATmega328 Figure 3.8. Il a plus ou moins la même fonctionnalité de l’Arduino Uno, mais dans un package différent.
Il ne dispose que d’une prise d’alimentation DC et fonctionne avec un câble USB Mini-B au lieu d’un câble standard pour se connecté au PC.
L’Arduino Nano (drone) peut être alimenté via une alimentation externe non régulée 6-20V (broche 30) ou Alimentation externe régulée 5V (broche 27).
La source d’alimentation est automatiquement sélectionnée pour la source de tension la plus élevée.
Il est généralement destiné pour des réalisations qui nécessitent la miniaturisation et à l’installation semi-permanente dans des objets ou des expositions, on l’utilise souvent dans la réalisation du transmetteur RF.
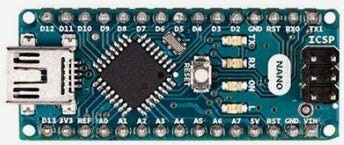
Figure 3.8 : Arduino Nano.
Module radio NRF24l01 2.4GHz
Notre système quadrotor reçoit des données de contrôle en temps réel, il a donc besoin d’avoir un système radio de bonne qualité.
Le transmetteur RF a besoin d’un module puissant pour envoyer le signal assez loin, mais le récepteur peut avoir un type normal d’antenne PCB. Le module radio que j’ai utilisé est celui avec l’antenne à puissance amplifiée, Figure 3.9.

Figure 3.9 : NRF24l01 Radio module 2.4GHz.
L’NRF24l01 est un module émetteur-récepteur qui utilise la bande de 2,4 GHz et peut fonctionner avec un débit de 250 Kbps à 2 Mbps à l’air libre.
La consommation d’énergie de ce module est juste d’environ 12 mA au cours de la transmission et la tension de fonctionnement est de 1,9 Volts à 3,3 Volts.
Le module NRF24L01 envoi et reçoit des données dans des «paquets» de plusieurs octets à la fois et la communication avec le microcontrôleur se fait via le protocole de communication SPI.
L’NRF24L01 peut utiliser jusqu’à 125 canaux différents, ce qui permet d’avoir un réseau de 125 modems indépendants en un seul module.
Ces unités ont beaucoup de complexité interne, mais certaines personnes talentueuses ont écrit des bibliothèques Arduino qui nous facilitent la tâche et nous donne beaucoup de liberté en programmation.
Les joysticks
Les parties les plus importantes du contrôleur radio sont les joysticks, mieux dits, les potentiomètres.
Un joystick Figure 3.10, est un dispositif de contrôle du curseur utilisé dans les jeux informatiques et la technologie d’assistance basé sur des potentiomètres.
Le joystick qui a obtenu son nom du bâton de contrôle utilisé par un pilote pour contrôler les ailerons et les ascenseurs d’un avion, c’est un levier à main qui pivote sur une extrémité et transmet ses coordonnées par l’intermédiaire d’un microcontrôleur.
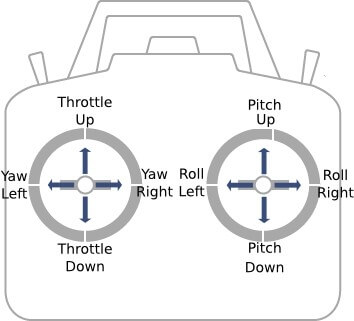
Figure 3.11 : Commandes de vol du drone.
Les émetteurs radiocommande des quadrotors comportent deux potentiomètres de précision dans chaque joystick, dont ils varient la valeur de la résistance en fonction des accès de contrôle pour les mouvements Pitch, Roll, Yaw et Throttle, Figure 3.11.

Figure 3.10 : Joystick de haute qualité.
Dans ce contexte, on utilise l’Arduino Nano pour convertir le signal d’entrée de chaque potentiomètre en un signal numérique, puis le module radio NRF24101 permettra d’envoyer les variations de ces valeurs au récepteur du drone.
En fait, ces valeurs numériques correspondent à la position du bâton de contrôle de chaque joystick.
La carcasse du quadrotor et du transmetteur RF
Le châssis c’est l’élément central du drone qui détermine son envergure totale. La réalisation d’un quadrotor de petite taille exige l’utilisation d’un cadre léger, rigide et harmonique.
Ainsi pour le transmetteur RF, il faut couvrir le circuit imprimé avec une carcasse confortable pour faciliter l’utilisation et pour le protégé.
L’impression en 3D m’a permis de construire les carcasses voulus à base de nylon ultra polyamide (PLA) en utilisant les fichiers sources du logiciel SOLID WORKS[15] Figure 3.12.
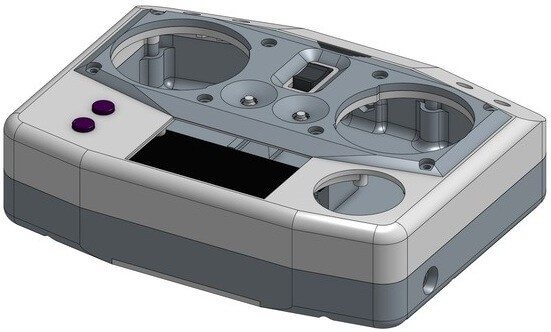
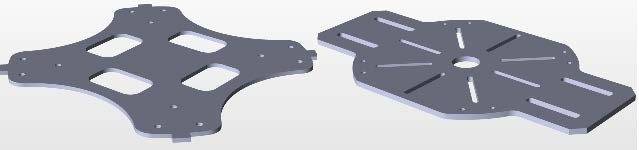
Figure 3.12 : Les carcasses construites avec logiciel SOLID WORKS en 3D.
L’architecture du châssis du quadrotor est optimisée permettant de dégager beaucoup d’espace pour que les composants soient installés sans difficulté, pour cela j’ai construit un circuit imprimé permettant de faire le câblage des ESC et le contrôleur de vol avec la batterie plus facilement comme le montre la Figure 3.13.
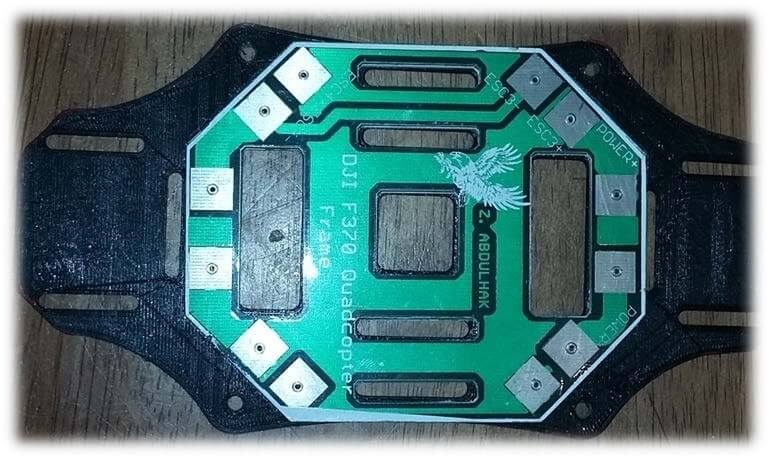
Figure 3.13 : Circuit imprimé du plat inferieur réalisé avec logiciel Eagle CAD soft.