
Le fonctionnement d’un véhicule : connecté et automatisé
Chapitre 2. Le fonctionnement d’une voiture « non traditionnelle ».
Section 1. Un véhicule connecté.
Les travaux actuels sur les véhicules autonomes indiquent que les composants logiciels (composants de fusion de données, de reconnaissance de situations, de planification de trajectoire, et plus généralement de prises de décision) intégreront de plus en plus d’éléments par programmation déclarative, autrement appelée « deep learning ».
Un principe qui permet à la machine d’apprendre par l’exemple c’est-à-dire qu’en situation réelle les composants logiciels par programmation déclarative adoptent le comportement défini par la description du problème à résoudre –comprenant généralement l’état initial, l’objectif, et des modèles ou fonctions permettant de passer entre différents états–.
Le véhicule autonome, par définition, est un véhicule connecté qui est composé intrinsèquement de capteurs et de systèmes de connectivité qui lui permettent de transmettre une multitude de données sur sa position, sa vitesse, l’état de ses organes, la pression des pneus, et même sur le conducteur et son comportement.
A l’extérieur cette fois, le véhicule est conçu pour recevoir une multitude d’informations sur l’état du réseau routier, la circulation, la disponibilité de places de stationnement, etc.
Ainsi, il permet à ses usagers d’interagir avec l’extérieur pour communiquer ou se divertir.11
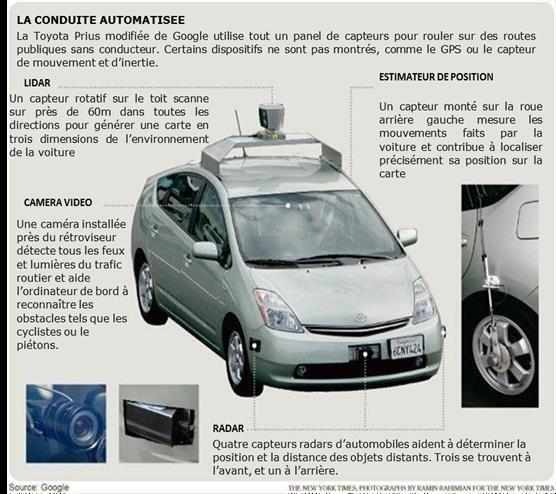
Lorsqu’il atteint un stade d’automatisation élevé avec toutes les technologies de détection (GPS, capteurs: lasers, caméras, radars), de représentation (cartographie), de connectivité (communication entre véhicules autonomes, et entre infrastructures et véhicules autonomes), d’algorithmes, le véhicule intelligent est capable de traiter les données recueillies pour décider à la place du conducteur.
Annexe 1: La structure d’un véhicule automatisé
Section 2. Un véhicule automatisé.
§1. L’automatisation.
Qu’est-ce-que l’on entend réellement par une conduite « autonome » ?
Un véhicule autonome peut-il conduire sans aucune intervention de l’automobiliste ?
En réalité non, puisqu’en l’état des avancées technologiques actuelles, la majorité des prototypes supposent qu’en cas de circonstances risquées, l’individu à bord puisse reprendre les commandes du véhicule automobile à tout moment. Donc, il faudrait plutôt parler « d’automatisation »12.
Il y a certes une exécution totale ou partielle de tâches techniques par la voiture, fonctionnant sans intervention humaine, mais étant donné la distinction en fonction des stades d’automatisation, il n’y a pas encore autonomie tant que le conducteur est encore amené à intervenir.
§2. Les niveaux d’automatisation.
Il existe plusieurs référentiels utilisés par l’industrie automobile pour classer les niveaux d’autonomie d’un véhicule.
A) Le référentiel américain.
En 2013, le tout premier référentiel conçu pour qualifier le niveau de prise en charge de la conduite par les logiciels de pilotage automatique des véhicules fut celui de l’agence fédérale américaine du transport NHTSA (National Highway Traffic Safety Administration), entré en vigueur en octobre 201613. Cette classification va du niveau 0 au niveau 4:
Niveau 0: pas d’assistance à la conduite, le conducteur du véhicule a le contrôle total et exclusif à tout moment des fonctions primaires du véhicule: les freins, la direction, l’accélération, la force motrice.
Niveau 1: assistance à la conduite – le conducteur a encore le contrôle total de son véhicule mais il dispose de fonctions d’aide ou d’assistance à la conduite (ABS, ESP, assistance au freinage, régulateur et/ou limitateur de vitesse).
Niveau 2: au moins 2 fonctions primaires du véhicule sont automatisées.
Le véhicule peut être doté de divers dispositifs d’aide à la conduite plus avancés, qui interviennent par exemple à la fois sur le freinage et l’accélération.
Niveau 3: contrôle partiel du conducteur – les véhicules à ce stade permettent au conducteur de céder le contrôle complet du véhicule et de toutes ses fonctions primaires, dans certaines conditions de circulation et météorologiques.
Le véhicule est capable de détecter un changement de ces conditions ne lui permettant plus d’assurer un autopilotage, et d’informer son conducteur pour qu’il puisse reprendre le contrôle du véhicule dans un laps de temps confortable.
Niveau 4: autonomie complète – le véhicule est conçu pour assurer pleinement toutes les fonctions principales de conduite et apte à circuler en toute autonomie sur la totalité d’un trajet.
Le conducteur n’a pas besoin d’intervenir pour reprendre son contrôle.
B) Le référentiel européen.
Annexe 2: Standard édicté par l’OICA, les 6 niveaux d’automatisation de la conduite
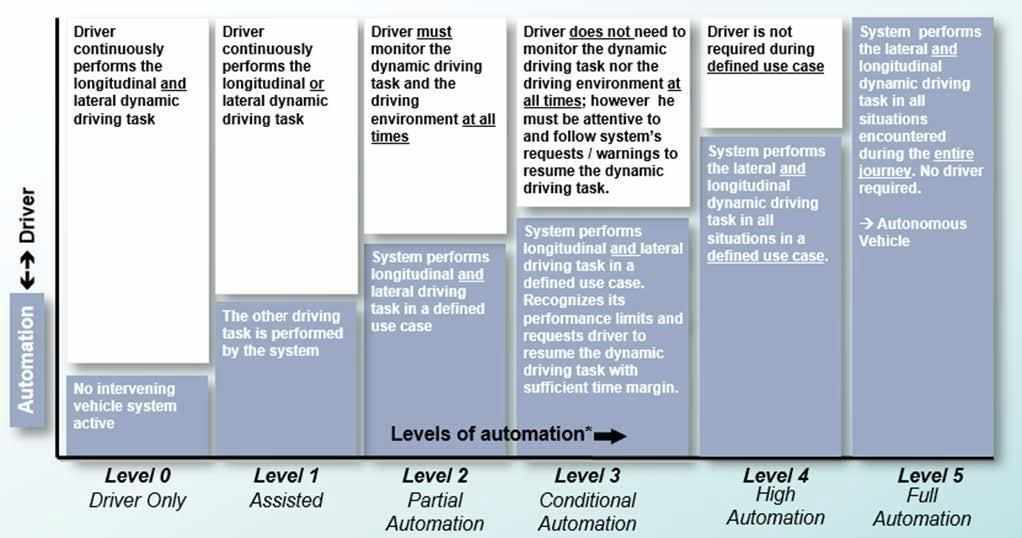
Le barème appliqué en Europe est celui conçu par l’OICA (Organisation International des Constructeurs Automobiles), identique à celui de la SAE International14, composé de 6 échelons: de 0 à 5.
Par rapport au barème conçu par la NHTSA, ici, on subdivise le niveau 3 américain en 2 échelons distincts pour le système européen (3 et 4). Aujourd’hui, le barème SAE International semble prédominer sur celui de l’administration américaine15.
- Niveau 0: aucune automatisation
- Niveau 1: assistance à la conduite
- Niveau 2: automatisation partielle
- Niveau 3: automatisation conditionnelle: conduite automatisée dans des situations définies sans surveillance du conducteur, avec reprise en main requise par le conducteur en cas de demande du système.
- Niveau 4: automatisation élevée: conduite automatisée dans des situations définies sans surveillance conducteur sans besoin de reprise en main.
- Niveau 5: automatisation complète
Chaque niveau relate d’une évolution en termes d’automatisation16. Aux niveaux 1 et 2 le conducteur conserve le maniement du véhicule tout en recevant progressivement diverses aides à la conduite (limiteur de vitesse, régulateur de vitesse, GPS, etc.).
A partir du niveau 3, un cap d’automatisation important est atteint: le conducteur ne conduit plus mais la difficulté réside dans le fait qu’il peut être sollicité à tout moment pour reprendre le contrôle du véhicule. Encore faut-il qu’il soit en mesure de le faire. C’est à partir de ce stade que le rôle du conducteur se trouve repensé.
Au niveau 4, le conducteur ne conduit plus car l’automatisation arrive à un stade élevé: le système embarqué doit assurer que le véhicule se trouve en situation de sécurité (auquel cas, le conducteur est encore en mesure de reprendre la main).
Il est évident qu’une première rupture se produira lorsque des véhicules à délégation partielle de conduite pourront circuler sur le réseau routier. Mais la rupture la plus importante interviendra aux niveaux 4 et 5 SAE: lorsque des véhicules sans conducteur à bord pourront circuler sur tout ou partie du réseau routier, et notamment les rues et voies de desserte des habitations. Si cela arrive un jour… !
En conclusion, plusieurs distinctions s’imposent:
- Le véhicule à délégation partielle de conduite concernera les véhicules légers se trouvant jusqu’aux niveaux 3 et 4 d’expérimentation, tandis que le véhicule à délégation totale de conduite (ou véhicule autonome/sans conducteur) concernera les véhicules légers 4 places du stade 5.
- Le véhicule interconnecté (qui échange avec d’autres voitures sur la route (connexion appelée «V2V » en anglais), avec les infrastructures routières (V2I) et le cloud) et véhicule non connecté.
§3. Structure du véhicule automatisé.
A) Une automobile « sur-équipée ».
Le véhicule automatisé est équipé de plusieurs capteurs qui lui permettent de savoir où il est (capteur de localisation), s’il va heurter un obstacle (capteur de détection) et quel est l’obstacle qu’il risque de heurter (capteurs d’identification)17.
Aux stades 2 et 3 d’automatisation, ces capteurs sont principalement:
* Des sonars à ultrason (« Sound Navigation and Ranging »):
Ils émettent régulièrement des ondes sonores qui, une fois réfléchies, permettent de mesurer la distance entre l’émetteur-récepteur du véhicule et l’objet. Ce capteur est peu perturbé par les conditions atmosphériques. Leur portée est faible, ils ne peuvent pas mesurer les vitesses mais ils sont efficaces pour les mesures en trois dimensions à faible distance. Ils sont petits et peu chers.
* Des caméras:
A haute résolution, elles sont capables de transmettre au véhicule des pixels en très grand nombre. Elles permettent l’identification et la classification des objets ou personnes à l’extérieur du véhicule. Mais elles peuvent être aveuglées par une lumière trop forte, ou lorsqu’il fait nuit, la scène à observer doit être éclairée.
* Des scanners lasers (LiDAR ou Light Detection and Ranging):
Ils permettent par l’émission d’une lumière dans le spectre infrarouge de mesurer une distance avec la réflexion de la lumière émise.
Utilisant des miroirs en rotation, les scanners laser 3D ont un large champ d’observation et peuvent mesurer une distance entre 2 mètres au minimum et 350 mètres au maximum. Cependant, ils peuvent être sensibles aux conditions météorologiques difficiles.
Ce sont des capteurs lourds et extrêmement chers (plusieurs dizaines de milliers d’euros) mais les fabricants sont en passe de proposer des capteurs plus petits et bien moins chers.
* Des caméras 3D:
Elles permettent d’avoir des images en couleurs en trois dimensions, sans toutefois avoir une très grande portée.
* Des radars (« Radio Detection and Ranging »):
Petits et peu chers, ils mesurent la distance grâce à la réflexion des ondes émises. Ils peuvent mesurer les vitesses relatives et les distances relatives des objets extérieurs. Ils ont une bonne portée, mais leur résolution est faible.
Les radars peuvent fonctionner à très courtes distances mais moins bien que les sonars. Ils sont principalement utilisés pour prévenir les collisions.
* Des caméras infrarouges:
Elles permettent de voir la nuit. Il en existe deux types: pour l’infrarouge lointain (« far infrared » ou FIR), et pour l’infrarouge proche (« near infrared » ou NIR).
* Des capteurs de localisation:
Le GPS qui donne la localisation dans l’espace à trois dimensions, ainsi que la vitesse et le cap du véhicule, ou le GPS différentiel plus précis.
B) Fonctionnement et mise en œuvre du véhicule automatisé.
Les perspectives d’utilisation du véhicule autonome dépendent tout d’abord de son niveau d’automatisation. En effet, en fonction du niveau d’automatisation, il sera possible de déterminer la part des tâches de conduite que l’on pourra déléguer ou non à un système de pilotage automatique, faisant interagir l’homme et la machine.
Les principales: le contrôle/la surveillance, la planification, la prise de décision et la réalisation des actions choisies.
Dans un second temps, il faut déterminer quelles tâches à réaliser constituent les dites fonctions. Par exemple contrôler implique la reconnaissance et l’interprétation de signaux. Pour cela, les équipements à disposition peuvent prendre le relais en phase de conduite autonome.
Ensuite, ces fonctions seront confiées à l’humain ou à la machine selon leurs capacités dans des conditions opérationnelles « normales ». Par exemple, l’ordinateur collecte des informations sur le trafic (circulation dense), les analysent (estimation du retard potentiel, itinéraire alternatif possible) et laisse à l’automobiliste le choix de la suite des opérations.
La mise au point des systèmes de pilotage automatique des véhicules impliquera un long apprentissage pour que le système réagisse aux diverses situations rencontrées.
Comme le rappelle l’institut VEDECOM, acteur très impliqué dans le développement de ce type de véhicules, il s’agit en effet d’associer des « blocs fonctionnels capables de capter, percevoir, analyser, communiquer, planifier, prendre des décisions et agir en vue de réaliser une action ordonnée par l’opérateur humain ».
Pour cela, les programmes informatiques doivent constamment être dotés de données d’expérience, d’algorithmes capables d’apprendre tous seuls par accumulation d’expériences (le « machine learning »)18.
Plusieurs questions se posent et devront trouver réponse pour que la voiture automatisée soit acceptée: comment cohabiteront les véhicules à conduite automatisée qui appliquent un algorithme de conduite basé sur la similitude avec des situations rencontrées auparavant, et les véhicules conduits par des humains ?
Les exigences de sécurité fixées pour une « voiture-robot » devront-elles être nettement supérieures à celle d’un conducteur humain responsable et attentif ?
§4. A quand la voiture autonome sur nos routes ?
Annexe 3: l’avancée du déploiement des voitures autonomes.
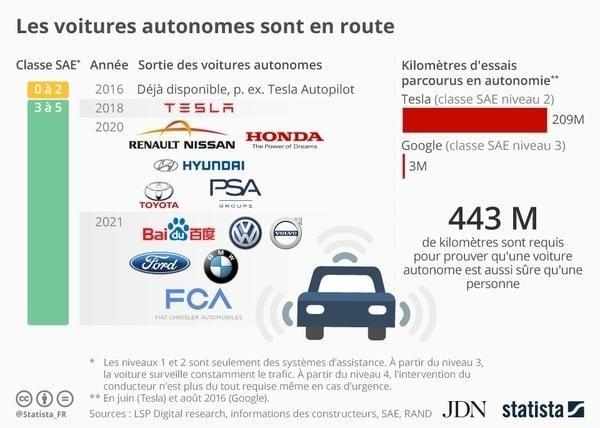
Aujourd’hui, malgré leur développement avancé, les voitures automatisées se résument à des prototypes, ne dépassant pas encore le stade 2 voire 3 d’automatisation du référentiel SAE International, et qui circulent sous certaines conditions et avec certaines limites.
En effet, il existe des contraintes techniques: la route doit être en bon état, la circulation spécifiquement prévue dans des zones dédiées et soumise à autorisation des autorités publiques, et la présence d’un ingénieur à bord est également obligatoire à ce stade.
En fonction des constructeurs et industriels, les prévisions de la mise en circulation sur les voies publiques divergent19.
* Elon Musk, fondateur et PDG de Tesla, a déclaré que la première Tesla entièrement autonome devrait être prête pour circuler sur les routes en 2018, soit deux ans plus tôt que ce qu’il avait annoncé en 2014. Toutefois, il a affirmé que la difficulté des règlementations entourant ces véhicules pourraient retarder de un à trois ans leur commercialisation.
* Mark Fields, directeur général de Ford, estime qu’il faudra attendre au moins 2020 pour que ses voitures soient totalement autonomes. Tout comme Nissan Motors qui annonce qu’à cette date-là, ses voitures pourront rouler en environnement urbain.
* Pour les plus retardataires (ou plus mesurés): Jaguar et Land Rover ont annoncé qu’il faudra s’attendre à voir apparaître leur voiture totalement autonome dans les dix prochaines années, alors que le président de Daimler (Mercedes-Benz) parie sur 2025.
Avec le niveau 5, on entre pleinement dans le domaine de la voiture « robot » qu’on imagine capable de se déplacer sans aucun individu à la place du conducteur.
11 Observatoire Cetelem. La composition d’un véhicule connecté: Voitures autonomes: les automobilistes prêts à lâcher le volant pour la Silicon Valley, 2016: http://observatoirecetelem.com/wp-content/uploads/2013/07/observatoire-cetelem-automobile-2016.pdf
12 Définition de l’automatisation – Encyclopédies Larousse: http://www.larousse.fr/dictionnaires/francais/automatisation/6753
13 Reese H. Niveaux de conduite automatisée – référentiel NHTSA – Autonomous driving levels 0 to 5: Understanding the differences;20 janv. 2016: http://www.techrepublic.com/article/autonomous-driving-levels-0-to-5-understanding-the-differences/
14 Niveaux de conduite automatisée – référentiel SAE International J3016 – janv. 2014: https://www.sae.org/misc/pdfs/automated_driving.pdf
15 Godsmark P. The definitive guide to the levels of automation for driverless cars– 04 oct. 2017 https://www.driverless.id/news/definitive-guide-levels-automation-for-driverless-cars-0176009/ 16 Sylvain G. Comprendre les 6 niveaux d’autonomie d’un véhicule – 27 janv. 2016: https://aruco.com/2016/01/niveaux-vehicule-autonome/
17 Rocchi J-F., Bodino P., de Tréglodé H., Flury-Hérard B. & Ricard F., Fév. 2017. L’automatisation des véhicules.
18 Institut Vedecom. Véhicule autonome: accompagner la transition, perspectives d’usage et enjeux pour les différents acteurs, sept. 2016 http://www.vedecom.fr/wp-content/uploads/VA20-20IESFVEDECOM202016.09.22 Note20d27analyse_D.pdf