CHAPITRE I :
GENERALITES SUR L’AUTOMATISATION
L’automatisation regroupe l’ensemble des opérations effectuées pour permettre la gestion autonome des équipements.
La réalisation de cette gestion n’est possible que grâce à l’instrumentation et à l’automatisme.
L’instrumentation est la mise en place d’une chaine d’acquisition ayant pour
rôle d’extraire les données pertinentes du processus en vue de les traiter.
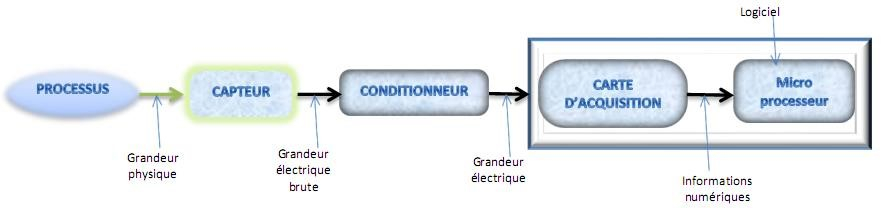
Figure.1 – Composition d’une chaine d’aquisition d’un point de vue fonctionnelle Deux aspects fondamentaux surgissent :
Choisir un capteur
Envoyer le signal jusqu’à l’organe de traitement.
L’automatisme est l’ensemble des objets techniques permettant la gestion autonome des processus mécanisés.
Ces objets techniques se servent des informations provenant de l’instrumentation.
Le contrôle de processus est une grille de lecture qui s’applique à la plupart de nos activités.
Les quatre éléments d’un schéma élémentaire de contrôle de processus dans une automatisation sont :
Un processus physique ;
Un capteur qui réalise la mesure de la grandeur à contrôler ; Un organe de traitement ; Un actionneur.
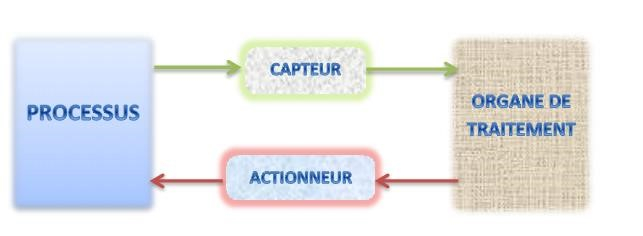
Figure.2 – Schéma élémentaire de contrôle de processus dans une automatisation
I.1. INSTRUMENTATION
I.1.1. GENERALITES SUR LES CAPTEURS
a. Définitions et caractéristiques
La grandeur physique objet de la mesure : déplacement, température, pression, etc. est désignée comme le mesurande et représenté par m ; l’ensemble des opérations expérimentales qui concourent à la connaissance de la valeur numérique du mesurande constitue un mesurage. Lorsque le mesurage utilise les moyens électroniques de traitement de signal, il est nécessaire de produire à partir du mesurande une grandeur électrique qui est en soit une représentation aussi exacte que possible : ceci signifie que la grandeur électrique et ses variations apportent toutes, l’information nécessaire à la connaissance d’un mesurande.
Le capteur est le dispositif qui, soumit à l’action d’un mesurande non électrique présente une caractéristique de nature électrique (charge, tension, courant ou impédance) désigné par S et qui est fonction du mesurande :
S est la grandeur de sortie ou réponse du capteur, m est la grandeur
d’entrée ou excitation. La mesure de s doit permettre de connaitre la valeur de m
(figure 3).
La relation résulte dans sa forme théorique des lois physiques qui régissent le fonctionnement du capteur et dans son expression numérique de sa construction (géométrie, dimensions) des matériaux qui le constituent et éventuellement de son environnement et de son mode d’emploi (température, alimentation). Pour tout capteur, la relation sous sa forme numériquement exploitable est explicitée par étalonnage : pour un ensemble des valeurs de m connues avec précision, on mesure les valeurs correspondantes de s ce qui permet de tracer les courbes d’étalonnage
(figure.3.) ; cette dernière, à toute valeur mesurée de s, permet d’associer la valeur de m qui la détermine (figure.4.).
Capteur
Grandeur
électrique
(
s
)
Mesurande
(
m
)
m
t
s
t
𝑡
1
𝑡
2
𝑡
𝑛
𝑡
1
𝑡
2
𝑡
𝑛
Capteur
Grandeur
électrique
(
s
)
Mesurande
(
m
)
m
t
s
t
𝑡
1
𝑡
2
𝑡
𝑛
𝑡
1
𝑡
2
𝑡
𝑛
Figure.3 – Exemple d’évolution d’un mesurande (m) et de la réponse correspondante du capteur (S)
s
m





s
m
Figure.4- Courbe d’étalonnage d’un capteur : son établissement à partir des valeurs connues du mesurande m.
s
m


s
m
Figure.5 – Courbe d’étalonnage d’un capteur : son exploitation à partir des valeurs mesurées de la réponse s du capteur.
Pour des raisons de facilité d’exploitation, on s’efforce de réaliser le capteur, ou du moins de l’utiliser, en sorte qu’il établisse une relation linéaire entre les variations de la grandeur de sortie et celles de la grandeur d’entrée ∆𝑚 :
∆= 𝑆. ∆𝑚 (I.1)
Où S est la sensibilité du capteur.
Un des problèmes importants dans la conception et l’utilisation d’un
capteur est la constance de sa sensibilité S qui doit dépendre aussi peu que possible
:
De la valeur de m (linéarités) et de sa fréquence de variation (bande passante;
du temps (vieillissement) ;
De l’action d’autres grandeurs physiques de son environnement qui ne sont pas l’objet de la mesure et que l’on désigne comme grandeurs d’influence. En tant qu’élément de circuit électrique, le capteur se présente :
Soit comme un générateur, (s) étant une charge, une tension ou un courant et il s’agit alors d’un capteur actif
Soit comme une impédance, (s) étant alors une résistance, une inductance ou une capacité : le capteur est alors dit passif.
Cette distinction entre capteurs actifs et capteurs passifs basée sur leurs schémas électriques équivalents traduit en réalité une différence fondamentale dans la nature même des phénomènes physiques mis en jeu.
Le signal électrique est la partie variable du courant ou de la tension qui
porte l’information liée au mesurande : amplitude et fréquence du signal doivent être liées à l’amplitude et à la fréquence du mesurande. Un capteur actif qui est une source, délivre immédiatement un signal électrique ; s’il n’en est pas de même d’un capteur passif dont les variations d’impédance ne sont mesurables que par les modifications du courant ou de la tension qu’elles entrainent dans un circuit par ailleurs alimenté par une source extérieure. Le circuit électrique nécessairement associé à un capteur passif constitue son conditionneur et c’est l’ensemble du capteur et du conditionneur qui est la source du signal électrique.
I.1.2. DIFFERENTS TYPES DE MESURAGE POUVANT ETRE APPLIQUES EN
EXHAURE
I.1.2.1. MESURE ET DETECTION DE DEBIT
La mesure et la détection de débit peut se faire à l’aide:
Du débitmètre électromagnétique ; Du débitmètre ultrasonique.
a. Débitmètre électromagnétique
Principe
Le débitmètre électromagnétique fonctionne suivant le principe de Faraday. Quand un liquide conducteur s’écoule perpendiculairement à travers un champ magnétique, une différence de potentiel électrique est créée au sein du liquide. Cette différence de potentiel, captée à l’aide de deux électrodes permet, par le calcul, d’en déduire la vitesse puis le débit du fluide.

Figure .6 – Débitmètre électromagnétique
Cette création de tension électrique s’explique simplement si on observe les forces qui s’exercent sur les anions et cations présents au sein du liquide. Une charge électrique (électron, anion, cation) qui se déplace dans un champ magnétique subit une force (force de Laplace) qui tend à faire dévier cette charge de sa trajectoire initiale.
Selon que cette charge est positive ou négative elle sera déviée dans un
sens ou dans le sens opposé. Cette force s’exprime de la façon suivante :
𝐹 = 𝑞𝑣 ∧ 𝐵 (I.2)
Ou :
𝐹: la charge de la particule ;
𝑣: le vecteur vitesse ;
𝑞: la charge de la particule ; 𝐵: le vecteur champ magnétique.
Il en résulte une zone plutôt positive et une zone plutôt négative au sein du liquide qui passe dans le champ magnétique. On peut mesurer alors entre ces deux zones une différence de potentiel électrique à l’aide d’un voltmètre.
F
V
V
B
B
B
B
+
–
F
V
V
B
B
B
B
+
–
F
Figure .7 – Projection des forces électromagnétiques
Cette différence de potentiel ou tension, mesurée, sera directement proportionnelle à la vitesse des charges, donc à la vitesse du liquide et à son débit. Le liquide passant dans le champ magnétique, les charges subissent la force de Laplace et leurs trajectoires sont modifiées différemment selon leurs signes.
b. Débitmètre ultrasonique
Principe du dispositif
Une onde acoustique se propage dans un milieu donné à une vitesse c qui est la célérité du son dans le milieu et qui dépend de sa température.
La célérité du son dans l’eau est de : c=1435 m/s à 8°C.
Si le milieu de propagation est en mouvement à la vitesse par rapport à
l’observateur, la vitesse c’ mesurée par ce dernier a pour expression :
𝐶’ = 𝐶 + 𝑈𝑐𝑜𝑠𝛼 (I.3)
Le dispositif de mesure est constitué d’un émetteur d’impulsions ultra sonores et d’un récepteur qui en est distant de L ; la durée de propagation des impulsions entre émetteur et récepteur est :
(I.4)
L’émetteur et le récepteur sont des plaquettes piézoélectriques ; l’émetteur est excité par une tension électrique formée de trains d’ondes à haute fréquence (1 MHz par Exemple) ; le récepteur délivre un signal électrique de même forme que les variations de pression auxquelles il est soumis.
Dépend de la célérité c du son qui est fonction de la nature du fluide et de
sa température.
I.1.2.2. MESURE ET DETECTION DE NIVEAU
La conduite des opérations de transfert et de stockage de liquides dans les réservoirs requiert que puisse être apprécié l’état et leur remplissage, c’est-à-dire le niveau qu’y atteint le produit présent. La saisie d’information relative au niveau peut être effectuée sous deux formes : la mesure continue ou la détection de seuils.
En mesure continue, un capteur et son conditionneur délivrent un signal dont l’amplitude et la fréquence traduisent la valeur du niveau de liquide dans le réservoir : à chaque instant, l’opérateur peut donc connaitre le volume exact de produit présent ou le volume de stockage encore disponible.
En détection, le dispositif détecteur, constitué en fait d’un capteur délivre une information binaire signalant qu’un niveau seuil déterminé est ou non atteint :
La détection d’un niveau haut permet de stopper le remplissage évitant le débordement ; la détection d’un niveau bas arrête l’extraction du produit, assurant une réserve minimale dans la cuve et évitant la marche à vide des pompes.
L’association de deux détecteurs de seuil, haut et bas respectivement permet d’automatiser les opérations de remplissage et d’extraction des cuves.
Les méthodes les plus usitées sont :
La méthode hydrostatique avec traduction électrique ;
Méthode basée sur une propriété électrique du liquide ;
Méthode utilisant l’interaction d’un rayonnement avec le liquide
Le choix de la méthode appropriée amène à prendre en compte :
Les propriétés physiques et chimiques du liquide ainsi que leurs variations éventuelles : conductivité, constante diélectrique, masse volumique ; viscosité, formation de mousse, caractère corrosif ;
Les conditions de stockage, température, pression, présence d’un agitateur ;
Les facilités d’implantation.
Nous utiliserons la méthode hydrostatique étant donné le noir de la mine écarte toute interaction avec un rayonnement et que le liquide est simplement l’eau.
a. Méthode Hydrostatique L’indication fournie par les dispositifs est une fonction continue de la hauteur de liquide ; elle est indépendante de ses propriétés électriques mais dépend, sauf pour un flotteur, de la masse volumique du liquide. Cette méthode utilise soit un flotteur soit un plongeur.
1. Le flotteur
Il se maintient à la surface du liquide ; il est rendu solidaire, par câble et
poulie, d’un capteur de position analogique (potentiomètre circulaire) ou digital (roue codée) qui délivre le signal électrique correspondant au niveau.
h
Capteur de
position
h
Capteur de
position
Figure.8 – Flotteur
2. Le plongeur C’est un cylindre immergé dont la hauteur est moins égale à la hauteur maximale du liquide dans le réservoir. Le plongeur est suspendu à un capteur dynamométrique qui se trouve soumis à une force F, (poids apparent), fonction de la hauteur h du liquide.
𝑃 = −𝜌. 𝑔. 𝑆. ℎ (I.5)
Ou :
𝑃 : Poids du plongeur ;
𝑆 : L’aire de la section du plongeur ;
𝜌𝑔ℎ : Poussée d’Archimède s’exerçant sur le volume immergé du plongeur ;
𝜌 : Densité du liquide
𝑔 : Accélération de la pesanteur.
Capteur de forc
e
h
Capteur de forc
e
h
Figure.9 – Plongeur
b. Méthodes électriques
Ce sont les seules méthodes employant des capteurs spécifiques, c’est-à-dire traduisant directement le niveau électrique en signal spécifique ; leur intérêt réside dans la simplicité des dispositifs et la facilité de leur mise en œuvre.
CAPTEUR CONDUCTIMETRIQUE
Il est utilisable uniquement avec des liquides conducteurs (conductance
minimale de l’ordre de 50 µS) non corrosifs et n’ayant pas en suspension des phases isolantes (huile par exemple).
h
h
h min
Mesure de niveau par
2
électrodes Mesure de niveau par
1
électrode Détecteur de niveau
h
h
h min
Mesure de niveau par
2
électrodes Mesure de niveau par
1
électrode Détecteur de niveau
Figure.10 – Sondes conductimetriques
La sonde est formée de deux électrodes cylindriques, le rôle de l’une d’elles pouvant être assurée par le réservoir lorsqu’il est métallique. La sonde est alimenté par une faible tension (10 V) alternative afin d’éviter la polarisation des électrodes.
En mesure continue, la sonde est placée verticalement et sa longueur
s’étend sur toute la plage de variation de niveau : le courant électrique qui circule est d’amplitude proportionnelle à la longueur d’électrode immergée, mais sa valeur dépend de la conductivité du liquide.
En détection, on peut placer par exemple une sonde courte
horizontalement au niveau seuil : un courant électrique d’amplitude constante s’établit dès que le liquide atteint la sonde.
c. Mesure par onde acoustique
En mesure continue, on utilise un transducteur fonctionnant successivement en émetteur et en récepteur. Ce transducteur placé au sommet du réservoir émet, dans un cône de faible ouverture, des trains d’onde acoustique qui, après réflexion sur la surface du liquide retournent vers le transducteur qui les convertit en signal électrique.
L’intervalle de temps Δt séparant l’émission de la réception du train d’ondes
réfléchi est proportionnel à la distance du transducteur à la surface du liquide :
Il est fonction du niveau ; Δt est inversement proportionnel à la célérité du son qui dépend de la température : celle-ci doit donc être mesurée afin que puisse être effectuée la correction nécessaire. Le transducteur est une céramique piézoélectrique pour les ondes ultrasonores (40 kHz par exemple) il est de type électrodynamique pour les ondes sonores (10 kHz par exemple). Les ondes sonores qui sont moins atténuées par la propagation trouvent application pour la mesure de substances importantes (de 10 à 30 m) alors que les ondes ultrasonores procurent aux distances les plus courtes une précision de mesure supérieure. En détection, la sonde implantée au seuil à signaler, est constituée d’un oscillateur électromécanique dont le fonctionnement requiert la mise en vibration d’une membrane ; cette vibration est possible lorsque la membrane est au contact de l’air, elle devient impossible, du fait de l’amortissement accru, dès lors que le liquide est à son contact. La présence ou non d’oscillations est indiquée par un circuit approprié.
I.1.2.3. MESURE DE LA PRESSION
Dans les fluides en mouvement on doit considérer 3 types de pressions : la pression statique (𝑝𝑠) du fluide au repos, la pression dynamique (𝑝𝑑 ), due à la vitesse v du fluide en mouvement et enfin la pression totale qui est la somme des deux précédentes.
𝑝𝑠 + 𝑝𝑑 = 𝑝𝑇 (I.6)
La pression dynamique qui s’exerce sur une surface placée face à l’écoulement accroit la pression statique d’une valeur proportionnelle au carré de la vitesse v soit :
(I.7)
Où :
𝜌: est la masse volumique du fluide.
La mesure de ces pressions dans le fluide en mouvement peut être réalisée en reliant aux deux sorties d’un tube de Pitot deux capteurs séparément indiquant alors le premier la pression totale et le second, la pression statique.
En opposant les signaux de sortie de ces capteurs, on obtient la valeur de
la pression dynamique.
Capteur
1
Capteur
2
Vm
2
–
Vm
1
:
Pd
Vm
1
Capteur
1
Capteur
2
Vm
2
–
Vm
1
:
Pd
Vm
1
Figure.11 – Tube de Pitot
Il est possible d’équiper directement une antenne de Pitot avec deux capteurs de pression, miniaturisés, leur membrane étant placées l’une perpendiculairement à l’antenne (sens de l’écoulement), l’autre parallèlement à cet axe. Dans un mode de réalisation plus simple, en admettant que la pression totale et sur sa face arrière la pression statique.
membrane
quartz
Pt
Ps
membrane
quartz
Pt
Ps
Figure.12 – Capteur de pression dynamique
Tout capteur comportant une entrée pour une pression de référence, capteur de pression relative, peut donc convenir pour effectuer la mesure de la pression dynamique.