Réalisation de chargeur de batteries sans fil PIC 16F877
Chapitre IV : réalisation
Introduction :
Le projet réalisé est un chargeur rapide sans fil destiné pour les voitures électriques et/ou hybrides, Basé sur le fameux microcontrôleur Pic 16F877 qui commande et contrôle la charge des batteries lors du chargement. Un afficheur LCD pour l’indication des valeurs des courants et tensions et signalant tout événement.
L’application a été réalisée avec le langage C en utilisant le compilateur MikroC
I – le pic 16f877 de Microchip :
L’avantage de microcontrôleur pic c’est un composant bon marché de plus on peut trouver des compilateurs free download qui fonctionnent parfaitement. pour le 16 f877 est un microcontrôleur 8 bits CMOS en boîtier DIP 40 broches.
Il dispose de deux Timers/compteur 8 bits avec pré-scaler 8 bits, un Timer / compteur 16 bits avec pré-scaler, un Timer Watchdog (WDT) avec son propre oscillateur RC sur puce pour un fonctionnement fiable et deux Modules capture / compare PWM
I-2 Caractéristiques de pic 16F877 :
• 35 instructions
• Mémoire programme de 14 Ko
• Fréquence d’utilisation de DC à 20MHz
• Mémoire EEPROM donnée de 256 octets et RAM 368 octets
• 14 interruptions et 3 Timers
• Interfaces MSSP, USART, PSP, SPI et I2C
• Circuit de détection de baisse de Brownout, pour Reset (BOR)
• 33 broches d’E/S
• Large plage de tension d’utilisation de 4V à 5.5V
• Convertisseur analogique-numérique 10 bits multicanal
• Gamme de température d’utilisation de -40°C à 85°C
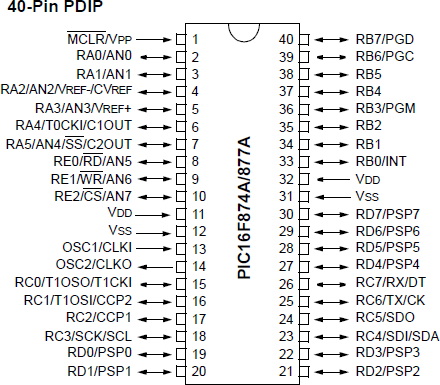
Figure 4_1 : pin diagram Pic16F877
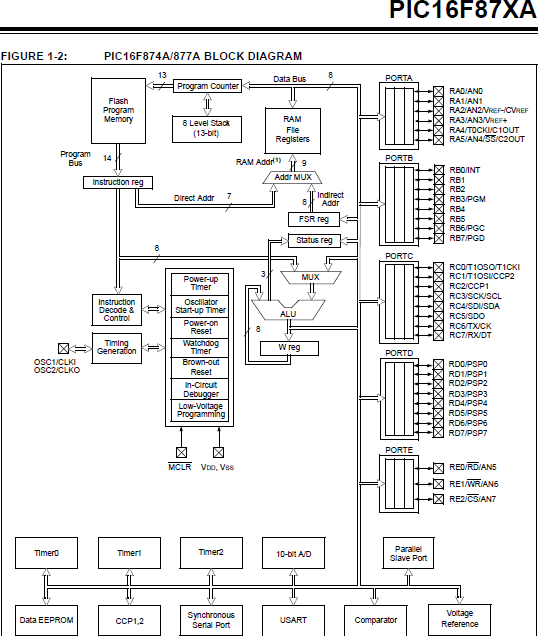
Figure 4_2 : Block diagram PIC 16F877
I-3 Conversion Analogique numérique ADC :
Ce processus est réalisé avec un convertisseur interne du microcontrôleur. Ce module est intégré dans la plupart des microcontrôleurs de moyenne et haute gamme.
La conversion implémentée sur les PIC a une résolution de 10 bits, ce qui permet un nombre allant de 0 à 1023, proportionnel aux valeurs de référence, qui sont par défaut 0 volts et 5 volts.
Cela signifie que si une entrée analogique a une tension de 0 volt, le résultat est à 0, et si la tension est de 5 volts, le résultat de la conversion est de 1023, de la même façon si la tension est de 2,5 volts, le résultat est de 512.
En fonction de la complexité d’un microcontrôleur, le PIC peut avoir jusqu’à huit entrées du signal analogique. Cependant, il est à noter que le microcontrôleur a un seul module interne de conversion.
Les 4 registres utilisés par le module convertisseur A/D sont :
-ADRESH en h’1E’ page 0 : MSB des 10 bits du résultat.
-ADRESL en h’9E’ page 1 : LSB des 10 bits du résultat.
-ADCON0 en h’1F’ page 0 : registre de contrôle n°0 du convertisseur.
-ADCON1 en h’9F’ page 1 : registre de contrôle n°1 du convertisseur.
Voir data sheet pic 16f877 (p127-P133)
II-Travail réalisé :
II-1 Schéma électronique :
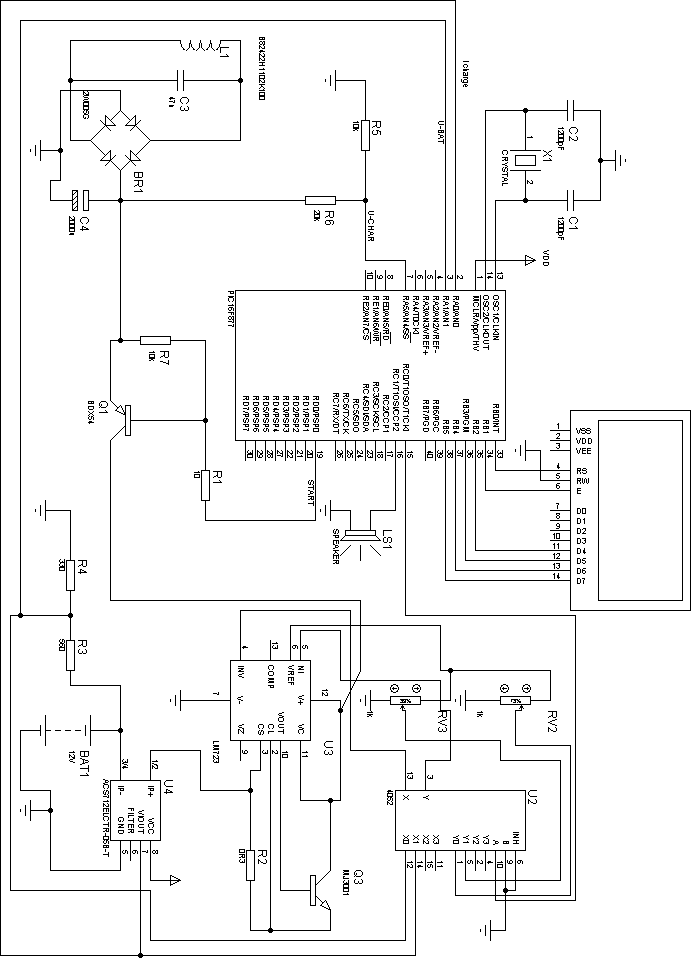
Figure 4_3 : schéma du chargeur sans fil
Le schéma 4_3 illustre notre chargeur sans fil qui est basé sur le pic 16f877, L1 C3 c’est un circuit résonateur de même dans le primaire avec une fréquence de 200 kHz ( ![]() ), en général pour les voitures électriques ce champs a une puissance de 20kw dans notre cas après redressement et filtrage par BR1 C4 le PIC surveille la tension sur la broche RA5 si cette tension atteint 12V le pic commande le chargeur via la sortie RA5 (START) le transistor Q1 est un Darlington sert comme un interrupteur pour alimenter le chargeur.
), en général pour les voitures électriques ce champs a une puissance de 20kw dans notre cas après redressement et filtrage par BR1 C4 le PIC surveille la tension sur la broche RA5 si cette tension atteint 12V le pic commande le chargeur via la sortie RA5 (START) le transistor Q1 est un Darlington sert comme un interrupteur pour alimenter le chargeur.
Le LM723 est régulateur de tension mais on l’a utilisé comme régulateur de courant aussi pour le chargement rapide, le ACS712/05 c’est un capteur à effet de hall sa sortie est une tension qui est l’image de courant sert à mesurer le courant, le transistor Q3 est un amplificateur de courant puisque le LM 723 débitant au max 150 mA.
Le CD4052 et un MUX sert à basculer entre le régulateur de courant et tension commander par le Pic via les entrer AB, RV2 est un ajustable pour régler le la référence tension RV2 pour référence courant.
En fin un afficher LCD 16X4 sert à afficher les valeurs de courant et tension de batterie et tout événement.
II-2 L’algorithme de fonctionnement
Debut
mise en service du chargeur
Afficher : chargeur On
Détection en cours ….
afficher : vous n’êtes pas Aligné
Envoyer un bip sonore
lancer la charge a courant fixe
U bat I bat
Afficher charge en cours
envoie un bip sonore
mesure de I bat
basculer vers chargeur à tension fixe
Afficher : fin de charge
FIN
Arrêter le chargeur
Figure 4_4: algorithme de fonctionnement
II-3 Principe de fonctionnement
Après la mise en service du chargeur le pic affiche un message de cette mise en service puis surveille la tension de charge si cette tension est suffisante on lance le chargement avec un courant fixe sino on affiche vous n’êtes pas aligné ou la voiture est mal stationnée
Un fois le chargement est lancée on envoie un bip sonore et on affiche que le chargement est en cours en plus les valeurs de courant et tension, dans cette phase le courant et fixe et la tension augmente arrivant à un tension ou un chargement à 80% on bascule vers régulateur de tension dans cette phase la tension est fixe mais le courant décroit jusqu’ à un seuil minimum généralement de 0.03 CA (capacité nominal de l’accumulateur ) ce seuil s’appelle aussi courant floating , après on envoie un bip sonore signalant la fin de charge et en affiche batterie chargé et on arrête la charge via le transistor Q1.
Phase I
phase II
phase III
80% de charge
chargement a
courant fixe
DETECTION
de champs suffisant
chargement a tension fixe
100 % de charge
t
Figure 4_5: phases de chargement
II-4 Programme réalisé en C avec le compilateur MikroC:
Le programme a été réalisé sous langage C en utilisant le compilateur très performant MikroC pour PIC bénéficie d’une prise en main très intuitive et d’une ergonomie Sans faille.
Ses très nombreux outils intégrés (mode simulateur, terminal de communication Ethernet, terminal de communication USB, gestionnaire pour afficheurs 7 segments, analyseur statistique, correcteur d’erreur, explorateur de code, mode Débug ICD…) associé à sa capacité à pouvoir gérer la plupart des périphériques rencontrés dans l’industrie (Bus I2C, 1Wire, SPI, RS485, Bus CAN, USB, gestion de cartes compact Flash et SD/MMC, génération de signaux PWM, afficheurs LCD alphanumériques et graphiques, afficheurs LEDs à 7 segments, etc…) en font un outil de développement incontournable pour les systèmes embarqués.
On a utilisé la conversion analogique numérique pour les 3 valeurs Ucharge , U bat, Ibat Avec les entré An4, An1, AN0 respectivement.
Pour effectuer ces conversions le compilateur MikroC PRO offre une bibliothèque prédéfinie ADC pour faire la conversion. Cette bibliothèque contient une fonction appelée ADC_Read (unsigned short channel). Cette fonction retourne le résultat de la conversion de la chaine spécifiée par le paramètre channel.
III- Simulation :
III-1 Shéma électronique
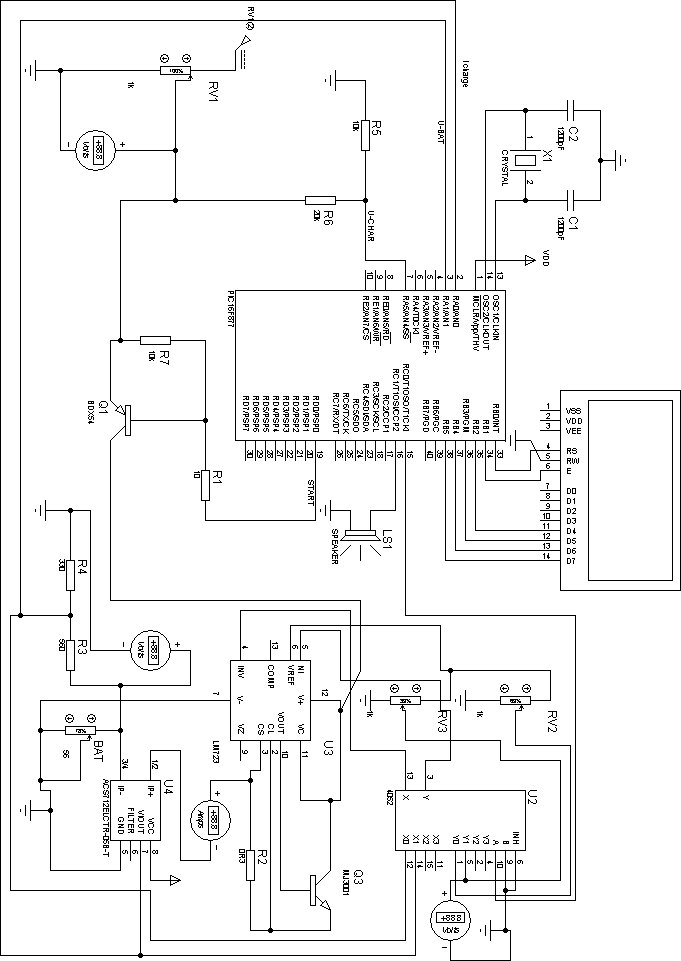
Figure 4_6 : schéma de simulation
Pour la simulation on a utilisé le logiciel Proteus pro le schéma est le même que celui de réelle sauf on a changé le circuit résonateur par un potentiomètre avec une tension de 15 v Dc et la batterie aussi par un potentiomètre
RV1 simule le bon stationnement de la voiture si la voiture et loin ou mal positionné on à un RV1 avec une grande valeur
Pour la batterie si elle est déchargée c’est l’équivalent d’une résistance faible valeur.
III – 2 Résultats et Discutions
LM041L
LCD1
LM041L
Après le chargement de fichier hexadécimal dans le pic et le lancement de simulation l’affichage devient comme le montre la figure 4_7 , lorsque on agit sur RV 1(mouvement de la voiture) jusqu’à l’obtention d’une tension de charge suffisante le Pic affiche les informations comme la figure 4_9 le montre, après on agit sur le potentiomètre BAT pour simuler le chargement en augmentant la valeur jusqu’à l’obtention un seuil min de courant de charge le Pic arrête le chargement et l’affiche batterie entièrement chargée
Figure 4_7 : LCD (lancement de chargeur)
LCD1
LM041L
LCD1
LM041L

LCD1
LM041L
LCD1
LM041L
Figure 4_8 : LCD (voiture mal stationnée)
Figure 4_9 : LCD (charge en cours )
IV Conclusion :
Notre projet est un chargeur sans fil avec l’option du chargement rapide en utilisant un microcontrôleur connu et performant.
Ce projet nous a parmi d’approfondir dans la programmation des pic en langage C et se familiarisé avec les chargeurs sans fil pour auto qui est un sujet d’actualité et en cours d’amélioration surtout avec la technologie mobile tel que les smart phones.
Notre projet peut être amélioré par les futures générations en ajoutant un contrôle de température ou une commande par radio fréquence du primaire pour signaler un éventuel défaut du primaire ou commander la puissance de ce dernier.
Chapitre V : Conclusion générale
Conclusion Générale :
L’industrie de la voiture électrique est un domaine en cours de développement notamment pour régler le problème d’autonomie et les bornes de charge mais la recherche dans ce domaine est nécessaire puisque le pétrole c’est une énergie en voie de disparitions dans 20 à 30 ans d’après les chercheurs.
Concernant notre sujet sur les voitures à rechargement sans fil c’est un sujet trop récent pour cela la documentation est presque indisponible malgré ça on a essayé de faire ce Modeste projet.
Cette technologie nous offre beaucoup d’avantages en plus d’élimination du gros câble de recharge dans le future on pense à des voitures qui se chargent toutes seules
Les chercheurs travaillent aussi sur des chargeurs on line c’est-à-dire aimantée la route pour permettre de charger les batteries en roulant.
Mais y a toujours des inconvénients puisque dans la station de recharges la bobine primaire génère un champ électromagnétique très puissant qui est néfaste pour la santé des travailleurs dans cette station.
Bibliographie
Livre :
– Apprendre la programmation des PIC (auteur : PASCAL MAYEUX)
-Programmation en C des PIC (Auteur Christian Tavernier)
Mémoires de fin d’études
–BATTERY MANAGEMENT SYSTEM 2014/2015 (réalisé par FRIHI Billel)
3 – Support numérique
-30292D.pdf ( datasheet PIC16F87X de Microship)
Programmation_MikroC.PDF (université de Boumerdes )
R-REP-SM.2303-1-2015-PDF-F .PDF : Transmission d’énergie sans fil au moyen de techniques autres que la transmission par faisceau radiofréquence
-2014_WeiWang .PDF : ÉTUDE DE LA TRANSMISSION D’ÉNERGIE SANS FIL (WPT) BASÉE SUR LA RÉSONANCE COUPLÉE MAGNÉTIQUE
4- site web
www.breezcar.com
www.autonews.com
## Protection contre les commentaires indésirables : Shield Security a marqué ce commentaire comme « En attente de modération ». Raison : Le filtre d’indésirables humains a trouvé « /site/ » dans « url »##
Merci de nous partager cet article très instructif.