CHAPITRE 5 :
Conception et réalisation de la carte de commande
5 .Conception et réalisation de la carte de commande
Introduction
Ce chapitre sera consacré à la partie électronique du banc d’essai. Dans cette partie, nous présenterons un didacticiel de la platine de commande que nous adopterons, la solution matérielle et logicielle choisie pour cette dernière et la logique de commande incorporée.
5.1 .Schéma fonctionnel de la platine de commande
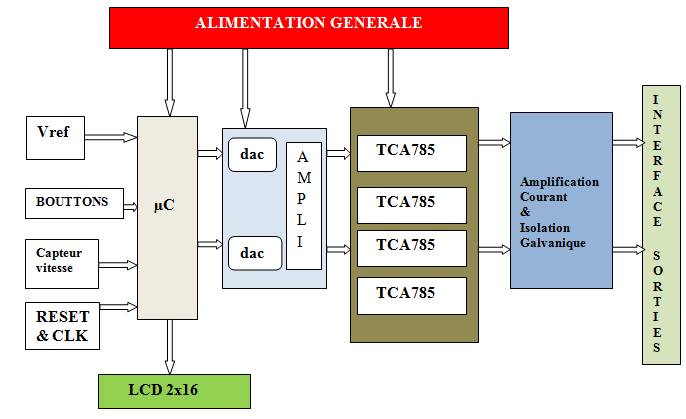
Figure 64 : schéma fonctionnel de la platine de commande
La platine de commande est divisée en trois cartes discrétisées en étages de composants, nous distinguons :
La carte d’alimentation générale qui fournit l’énergie nécessaire aux différents compartiments de la platine.
La carte de commande composée principalement d’un écran LCD effectuant l’interface homme machine, et du microcontrôleur et ses périphériques qui gère toutes les applications et prends des décisions sur l’état des sorties en fonction des entrées.
Deux convertisseurs numériques analogiques pour relier le microcontrôleur aux circuits commandés.
Des entrées de référence et de mesure pour la régulation de la vitesse.
Une carte de génération et d’isolation composée de quatre circuits intégrés TCA 785 commandés sous tension continue générant les impulsions de commande pour les gâchettes des thyristors.
Des transistors et des transformateurs d’impulsion constituant l’étage d’amplification et d’isolation de cette carte.
Une interface de sortie vers les deux convertisseurs.
5.2 .Solution matérielle
5.2 .1.Le microcontrôleur
Le microcontrôleur est le cœur de la carte. Il gère à la fois les entrées et les sorties ; il capture les valeurs d’entrées, effectue des calculs et prend la décision sur l’état du système. Son choix pour une application donnée dépend de plusieurs facteurs.
5.2 .1.1.Critères de choix
Les critères imposés pour le choix du microcontrôleur pour ce genre d’application sont les suivantes :
Le traitement des entrées logiques binaires ;
Le traitement d’au moins deux entrées analogiques ;
La possession d’au moins deux ports libres de huit points chacun ;
Le traitement des équations mathématiques lourdes ;
Un coût relativement acceptable ;
Assurer une instantanéité dans la réponse.
En réalité, plusieurs familles de microcontrôleurs peuvent très facilement réaliser ces taches, notamment les familles ARDUINO, STMicroelectronics, ou Motorola, mais notre choix s’est effectuer sur la famille Microchip Technology, le PIC. Ce choix s’est effectué sans doute avec notre maîtrise de manipulation et de cette famille et leur architecture.
Nous avons donc porté notre choix sur le PIC18f452. En effet, il possède des instructions très puissantes donc un programme à développer réduit et une programmation simple grâce en mode série, mais la cause principale du choix du 18F452 est qu’il dispose d’une mémoire flash assez importante et supporte tous les calculs lourds que nous avons effectués. Par ailleurs c’est le moins cher de sa série, il est donc le plus approprié pour notre application.
5.2 .1.2.Caractéristiques du PIC18F452
Le PIC18F452 fait partie intégrante de la famille des High Range (18) dont la mémoire programme est de type flash (F) 452 et capable d’accepter une fréquence d’horloge maximale de 40Mhz. Il possède une multiplication 8×8 matérielle, extrêmement rapide (100nS à 1uS) ce qui lui confère des possibilités de DSP particulièrement utiles pour le traitement numérique du signal, et dans les applications de contrôle commande, où la fiabilité et exigée, comme dans ce cas.
Le tableau ci-dessous présente les caractéristiques du PIC 18f452
| Caractéristiques | PIC18F452 |
| Fréquence Horloge MHz | DC-40 MHz |
| Mémoire programme FLASH | 32KO |
| Programme (Instructions) | 16384 |
| Mémoire données | 1536 Octets |
| Mémoire EEPROM | 256 Octets |
| interruptions | 18 |
| Ports parallèles | A, B, C, D, E |
| Timers | 4 |
| Capture/Compare/PWM | 2 |
| Communications séries | SPI / I2C / USART |
| Communications Parallèles | PSP |
| CAN 10-bit | 8 entrées |
| Détection de VDD faible programmable | oui |
| Instructions | 75 |
| Boitiers | 40-pin DIP |
Tableau 5: caractéristiques principales du PIC18f452
5.2 .1.3.Le PIC et ses périphériques sur la carte
Le PIC18f452 fait partie intégrante de la carte de commande. Celui-ci est alimenté sous une tension de 5v continu. Cette tension est découplée par un condensateur de 100nf : nous éviterons alors des resets intempestifs et des erreurs éventuelles.
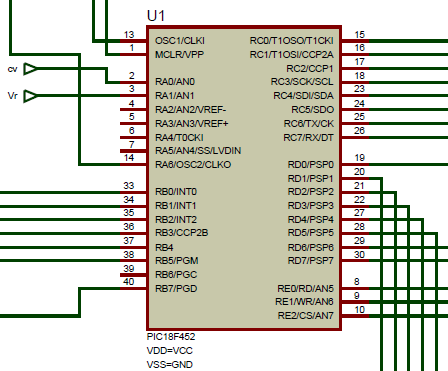
Figure 65 : le pic 18f452 dans le montage
La figure ci-dessus nous montre que les pins RA0 et RA1 sont utilisées, respectivement pour les entrées de mesure et de référence, le portb est réservé à l’envoi des signaux d’affichage et les ports D et C à l’envoi des signaux de commande vers les deux convertisseurs numérique analogique. Le port E quant à lui est réservé pour les boutons poussoirs du choix de la charge.
L’horloge
Pour notre application, nous avons choisi une horloge de 20Mhz pour le microconctroleur.la figure ci contre présente le schéma de branchement du quartz, dimensionné à la fréquence donnée, ayant deux capacités de 15pF à ses bornes, reliés directement à la masse. C’est cette horloge reliée aux pins 13 et 14 du pic qui fait battre le cœur de ce dernier, pour qu’il puisse ainsi réaliser les taches qui lui sont assignées.
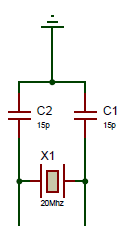
Figure 66 : l’oscillateur
Avant et après chaque essai, la carte de commande doit être remise à zéro, pour effacer les valeurs de l’essai précédent. Pour cela, un bouton poussoir est fourni à l’opérateur ; en effet, c’est un circuit simple, relié à la pin1 du microcontrôleur .Lorsque le bouton reset n’est pas appuyé, une tension de 5vDC est présente à la pin1, découplée par la capacité de 100nf en parallèle. Lorsqu’il est actionné, il remet la pin à la masse, et le programme s’arrête et reprend ; il n’est pas conseillé de faire un reset, lorsque le microcontrôleur est en plein calcul, ça pourrait avoir des impacts sur la partie opérative.
Le reset
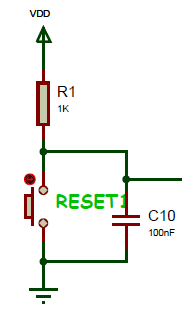
Figure 67: la logique reset
5.2 .1.4.Mappage des ports sur la carte
Pour être aisé dans la logique de programmation, l’indication de l’utilisation des ports du pic sera d’une grande utilité. En effet il s’agit de présenter l’utilisation des entrées sorties pour chaque pin utilisé. Le tableau ci après représente le mappage.
| PIN | PORT | Fonction de la broche | configuration | périphérique |
| 2 | A | RA0/AN0 | Entrée analogique | Capteur vitesse |
| 3 | A | RA1/AN1 | Entrée analogique | Vitesse réf |
| 14 | A | RA6/OSC2/CLK0 | Entrée d’horloge | Quartz 1 |
| 33 | B | RB0/INT0 | Sortie logique | D4_LCD |
| 34 | B | RB1/INT1 | Sortie logique | D5_LCD |
| 35 | B | RB2/INT2 | Sortie logique | D6_LCD |
| 36 | B | RB3/CCP2 | Sortie logique | D7_LCD |
| 37 | B | RB4 | Sortie logique | RS_LCD |
| 38 | B | RB5/PGM | Sortie logique | E_LCD |
| 40 | B | RB7/PGD | Sortie logique | Buzzer |
| 15 | C | RC0/T1OSO/T1CKI | Sortie logique | A8_dac2 |
| 16 | C | RC1/T1OSI/CCP2 | Sortie logique | A7_dac2 |
| 17 | C | RC2/CCP1 | Sortie logique | A6_dac2 |
| 18 | C | RC3/SCK/SCL | Sortie logique | A5_dac2 |
| 23 | C | RC4/SDI/SDA | Sortie logique | A4_dac2 |
| 24 | C | RC5/SDO | Sortie logique | A3_dac2 |
| 25 | C | RC6/TX/CK | Sortie logique | A2_dac2 |
| 26 | C | RC7/RX/DT | Sortie logique | A1_dac2 |
| 19 | D | RD0/PSP0 | Sortie logique | A8_dac1 |
| 20 | D | RD1/PSP1 | Sortie logique | A7_dac1 |
| 21 | D | RD2/PSP2 | Sortie logique | A6_dac1 |
| 22 | D | RD3/PSP3 | Sortie logique | A5_dac1 |
| 27 | D | RD4/PSP4 | Sortie logique | A4_dac1 |
| 28 | D | RD5/PSP5 | Sortie logique | A3_dac1 |
| 29 | D | RD6/PSP6 | Sortie logique | A2_dac1 |
| 30 | D | RD7/PSP7 | Sortie logique | A1_dac1 |
| 8 | E | RE0/AN5/RD | Entrée logique | BP_charge1 |
| 9 | E | RE1/AN6/WR | Entrée logique | Bp_charge |
| 10 | E | RE2/AN7/CS | Entrée logique | Bp_charge 3 |
Tableau 6 : mappage des ports utilisés
5.2 .2.Les convertisseurs numériques analogiques
La loi de générée par le pic étant numérique, la tension de commande quant à elle analogique, il faudrait donc passer à une conversion numérique analogique. Pour cela nous avons utilisé deux CNA 8 bits câblés respectivement aux ports C et D du microcontrôleur. Ces convertisseurs génèrent une tension de sortie image de la valeur numérique présente à son entrée .Nous avons donc utilisé le DAC0808 pour accomplir cette tache. Etant en sortie courant (pin 4), nous avons mis une résistance de 2k pour convertir celle-ci en tension, qui sera amplifiée. En outre, il nous donne une erreur maximale de mesure de l’ordre de 0.19%, avec un temps de stabilisation des mesures de l’ordre de 150ns. La figure suivante nous montre le branchement de l’un des convertisseurs sur le montage.
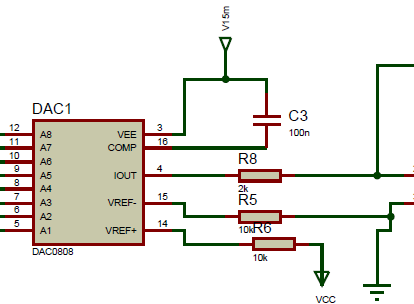
Figure 68 : le convertisseur numérique analogique
Comme pour le circuit d’essai, pour atteindre les caractéristiques maximales de la conversion, nous avons choisit une tension d’alimentation de 5VDC, et une tension VEE négative de -15VDC.
5.2 .3.Les amplificateurs opérationnels
Dans notre conception, deux amplificateurs opérationnels sont utilisés comme adaptateurs entre les CNA et les circuits TCA 785. En effet, comme les deux convertisseurs numériques analogiques ne fournissent que 1volt DC lorsque l’entrée hexadécimale est à 0xFF, cette valeur devrait donc à chaque envoi de signal être multipliée par quinze, vu que la tension maximale de commande pour les circuits de génération est de 15volts. Ainsi, à chaque valeur analogique de la tension fournie par le CNA, correspond à une réponse multipliée de l’AOP. La figure suivante représente l’un des étages d’adaptation.
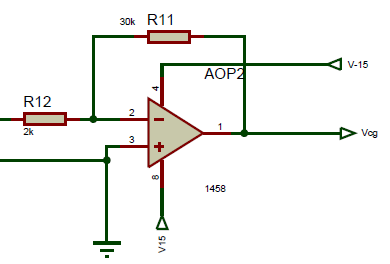
Figure 69: l’adaptation de signal
La résistance R12 est directement reliée à la sortie du convertisseur. Elle est fixée à 2K, comme indiqué par le constructeur, pour des contraintes courant. La résistance R11 étant à 30K, nous obtenons donc facilement le rapport d’amplification désiré de 15.
5.2 .4.Les boutons poussoirs
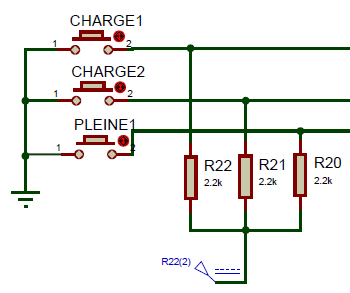
Figure 70: les boutons poussoirs
Pour le choisir la force de freinage à administrer sur le rotor du moteur de traction, trois boutons poussoirs sont présentés à l’opérateur. La charge est divisée progressivement en trois : une petite charge, une moyenne, et une pleine charge, selon le courant d’excitation ainsi envoyé à l’inducteur de la génératrice principale par le biais du pont mixte ainsi commandé parle microcontrôleur. Ces boutons sont connectés au port E configuré en entrée digitale.
5.2 .5.Les entrées de référence et de mesure
Vref
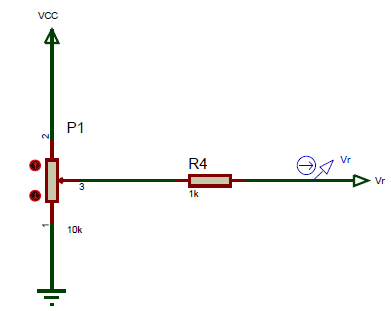
Figure 71: l’entrée de référence
Le but principal de la carte de régulation est d’obtenir une vitesse variable, selon le souhait de l’utilisateur. En effet, la tension de référence est l’échelon variable entre 0 et 5volts DC injecté à l’entrée analogique An1 du microcontrôleur ; elle est graduée sur huit niveaux, représentant les huit crans de vitesse sur lesquels la machine devrait être testée.
Vcapteur
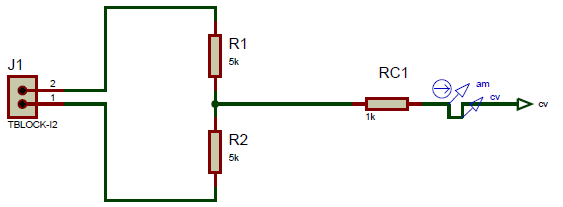
Figure 72: l’entrée de mesure
La dynamo tachymétrique accouplée sur l’arbre moteur-générateur fournit une tension continue, image de la vitesse de rotation qu’elle observe sur son arbre. Celle ci génère une tension de 10 volts DC, pour une vitesse de 3500 tours par minute ; Or l’entrée analogique du microcontrôleur AN0 sur laquelle le capteur est branché ne supporte qu’une tension de 5 volts. C’est pour cette raison que le signal vitesse a été conditionné par un diviseur de tension de coefficient 1/2.
5.2 .6.L’écran LCD
Pour établir une interface entre l’opérateur et la carte, il faut un système d’affichage pour passer l’information. Vu le nombre réduit de caractères à afficher, nous avons choisit un écran LCD 2*16 caractères pour afficher la vitesse de rotation du moteur de traction, et le mode de charge choisit, selon les boutons poussoirs explicités ci haut.
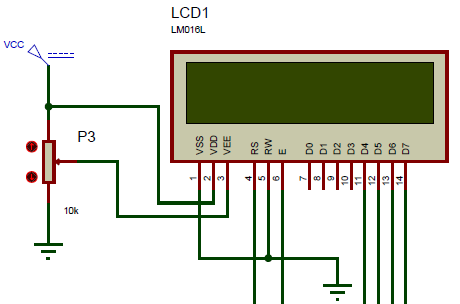
Figure 73: l’écran LCD
L’écran est alimenté sous une tension de 5V branchée à la pin2, et le potentiomètre de 10k effectue une division de la tension, et ainsi branchée à la pin3 pour varier le contraste et la luminosité.
Deux modes de fonctionnement de l’afficheur sont disponibles, le mode 4 bits et le mode 8 bits, modes que l’on choisira à l’initialisation de l’afficheur. Dans notre cas, nous avons choisit le mode 4bits pour diminuer le nombre de connections ; seuls les 4 bits de poids fort (D4 à D7) de l’afficheur sont utilisés pour transmettre les données et les lire. Les données sont alors écrites ou lues en envoyant séquentiellement les quatre bits.
Une impulsion positive d’au moins 450 ns doit être envoyée sur la ligne E pour valider chaque demi-octet.Dans ce cas, on peut alors relier la ligne R/W à la masse de façon à forcer l’afficheur en écriture. Ceci n’est pas gênant dans la mesure où on sait ce qu’on a écrit sur l’afficheur.
5.2 .7.Le Buzzer
Lorsque la vitesse de rotation indiquée par le capteur de vitesse atteint une vitesse de 3400 tours par minute, celle est jugée très grande et dangereuse pour la machine à courant continu. Ainsi donc sur la pin rB7 du microcontrôleur, une signalisation sonore est prévue lorsque l’incident apparaît, pour informer l’operateur qui devrait soit de diminuer Vref, soit d’augmenter la charge.
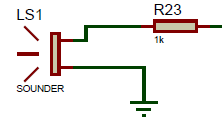
Figure 74: le Buzzer
5.2 .8.Le générateur d’impulsions : TCA785 [8]
5.2 .8.1.brochage
| PIN | SYMBOLE | FONCTION |
| 1 | GND | masse |
| 2 | Q2 inversé | Sortie 2 inversée |
| 3 | QU | Sortie U |
| 4 | Q1 inversé | Sortie 1 inversée |
| 5 | Vsynch | Tension synchro |
| 6 | I | inhibition |
| 7 | Qz | Sortie Z |
| 8 | Vref | Tension référence |
| 9 | R9 | Resistance de rampe |
| 10 | C10 | Capacité de rampe |
| 11 | V11 | Tension de commande |
| 12 | C12 | Durée d’impulsion |
| 13 | L | Longue impulsion |
| 14 | Q1 | Sortie 1 |
| 15 | Q2 | Sortie 2 |
| 16 | Vs | Tension d’alimentation |
Tableau7 : broches du tca 785
| PIN | SYMBOLE | FONCTION |
| 1 | GND | masse |
| 2 | Q2 inversé | Sortie 2 inversée |
| 3 | QU | Sortie U |
| 4 | Q1 inversé | Sortie 1 inversée |
| 5 | Vsynch | Tension synchro |
| 6 | I | inhibition |
| 7 | Qz | Sortie Z |
| 8 | Vref | Tension référence |
| 9 | R9 | Resistance de rampe |
| 10 | C10 | Capacité de rampe |
| 11 | V11 | Tension de commande |
| 12 | C12 | Durée d’impulsion |
| 13 | L | Longue impulsion |
| 14 | Q1 | Sortie 1 |
| 15 | Q2 | Sortie 2 |
| 16 | Vs | Tension d’alimentation |
Tableau7 : broches du tca 785
Le TCA785 est un circuit intégré de 16 pates DIL de commande par déphasage du point d’amorçage pour un thyristor. Les impulsions du trigger peuvent couvrir une plage allant de 0° à 180°. Les principales applications sont les circuits convertisseurs, les gradateurs monophasés et les ponts triphasés commandés. La figure et le tableau suivants montrent le brochage du circuit.
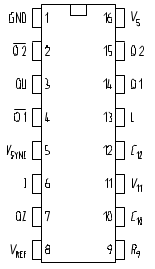
Figure 75: le tca 785
5.2 .8.2.description fonctionnelle
Le circuit intégré tca 785, est très utilisé pour la commande des thyristors. Nous l’avons choisit vu la simplicité de sa manipulation, et de son fonctionnement.
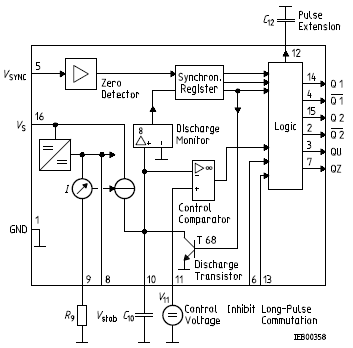
Figure 76: diagramme bloc du tca785
Le signal de synchronisation est obtenu par l’intermédiaire d’une résistance de valeur ohmique élevée de la tension de ligne V5. Un détecteur de tension nulle évalue les passages à zéro et les transfère au registre de synchronisation. Ce registre de synchronisation commande un générateur de rampe ; le condensateur C10 qui, chargé par un courant constant déterminé par la résistance R9 se décharge par saturation du transistor T68 ; cette décharge est contrôlée par un amplificateur opérationnel comparateur. Nous obtenons donc un signal en dents de scie.
Ainsi donc, si cette rampe V10 devient supérieure à la tension de commande V11, un signal logique est traité. En fonction de l’amplitude de cette tension V11, l’angle d’amorçage peut être varié dans une plage de zéro à 180 degrés. Pour chaque demi-onde, une impulsion d’environ 30 microsecondes apparaît au niveau des sorties Q1 et Q2.la durée de l’impulsion peut être prolongée jusqu’à 180° par l’intermédiaire du condensateur C12. Un signal logique de+180 est disponible à la sortie QU (pin3).L’entrée d’inhibition peut être utilisée pour déconnecter toutes les sorties. La pin 13 peut donc être t’utilisée pour étendre la longueur de l’impulsion jusqu’à sa longueur maximale. Les courbes des entrées sorties et les caractéristiques électriques du circuit intégré seront données en annexe.
5.2 .8.3.schéma électronique de l’étage de génération
L’étage de génération des signaux de commande pour les deux ponts comprends quatre tca 785 et les composants environnants .les quatre circuits sont identiques, mais différent seulement par la tension de sychronisation.les trois premiers ont la même tension de commande, dirigé par le PORT C du microcontrôleur, alors que le dernier est piloté par le PORT D. La figure suivante représente l’un des étages du circuit de génération ; nous nous sommes inspirés du montage que le constructeur siemens a proposé.
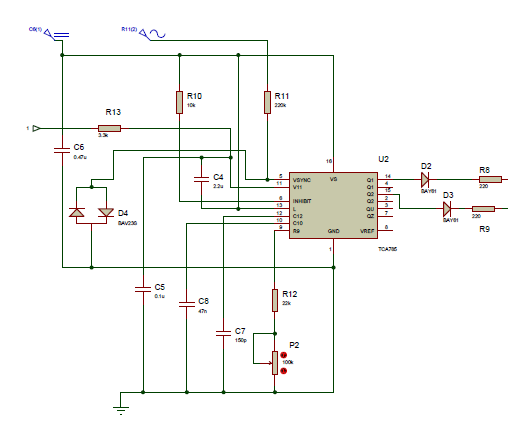
Figure 77 : étage de génération d’impulsions
Sur la figure ci-dessus le tca 785 est câblé de telle manière qu’il satisfait ses conditions de fonctionnement ;nous noterons notamment la présence de la capacité C8 et de la résistance R12,paramètres principaux du générateur de rampe.la résistance R12 est en série avec un potentiomètre P2 par le biais duquel, la pente de la rampe sera réglée.une résistance R11 de très grande valeur pour limiter le courant à 200mA et deux diodes de synchronisation sont placées à l’entrée 5 alternative sinusoïdale ; nous avons fournit une tension de 15VDC à la pin 16 d’alimentation pour fournir l’énergie nécessaire au montage. Nous observons l’entrée 11 qui est directement reliée à la première sortie de l’amplificateur opérationnel, venant de l’ordre de commande du pic. Cette tension de commande sera comparée à la rampe générée, pour fournir deux signaux impulsionnels aux sorties 14 et 15, déphasées sur une demi période que nous utiliserons pour commander deux thyristors du pont dont la conduction correspond aux critères. Ce montage adonc été répliqué quatre fois pour commander les deux ponts comportant au total huit thyristors.
5.2 .9.L’amplification des signaux de sortie et l’isolation galvanique
A la sortie du TCA 785, les signaux impulsionnels ne sont pas assez importants pour pouvoir amorcer les thyristors ; pour cette raison nous sommes amenés à réaliser un circuit d’amplification de courant en utilisant juste un transistor 2n2222, qui nous permet d’atteindre les valeurs désirées de courant acheminés vers les gâchettes des thyristors.la figure suivante nous montre le montage utilisé à cet effet.
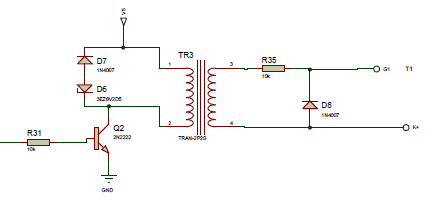
Figure 78: l’étage d’amplification et d’isolation
Un courant de sortie de 300mA suffirait pour déclencher le thyristor, la résistance de base est donc fixée à 3.3k. La diode D7 surveille le retour du courant dans le circuit de commande, tandis que la diode zener D6 limite la tension de gâchette à 3v comme convenu.
Le signal étant transmis de l’électronique de commande au circuit de puissance, la séparation galvanique au moyen de transformateurs d’impulsions simplifie le circuit et le protège contre la destruction par des transitoires de haute énergie. Ce sont des transformateurs ayant un large domaine d’application, notamment, dans la commande de redresseurs ; son noyau magnétique spécial lui permet de transformer le signal carré à son entrée, en une impulsion comprenant une phase de montée, de plateau et de descente ; la figure suivante nous montre l’impulsion de sortie.
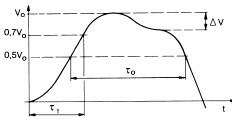
Figure 79: réponse d’un transformateur d’impulsion
La tension d’entrée V0 étant de 5V, nous choisirons donc le transformateur IT 145 dont le rapport de transformation est unitaire et une tension d’entrée 5V, pouvant supporter jusqu’à 500V et 2A .En outre la plage de la durée de l’impulsion qu’il fournit correspond rigoureusement à nos attentes.
5.2 .10.L’étage d’alimentation
Pour fournir l’énergie électrique aux circuits de régulation et de génération, nous avons besoin d’une alimentation. Celle ci doit des tensions de 15votls DC, 5volts DC, et -15volts DC, selon les besoins des composants utilisés.
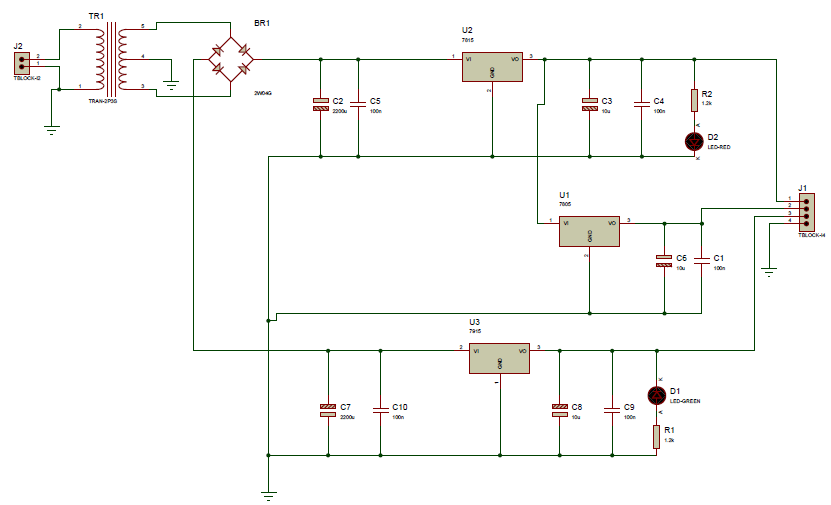
Figure 80: étage d’alimentation générale
En effet, le montage est principalement composé :
D’un transformateur à point milieu monophasé abaisseur de 12VA qui donne deux tensions de 24 volts alternatives sinusoïdales.
D’un pont moulé de graetz qui effectue le redressement de la tension alternative.
De deux capacités chimiques de valeur 2200 µF 35 volts pour filtrer les tensions positives et négatives fournies par le pont.
Deux trois régulateurs de tension pour fixer celle-ci à 15,5 et -15 volts, respectivement le LM7815, le LM7805 et le LM7915.
De deux diodes led pour indiquer la présence de la tension sur les deux étages positif et négatif.

